

概要
設計リソース
評価用ボード
型番に"Z"が付いているものは、RoHS対応製品です。 本回路の評価には以下の評価用ボードが必要です。
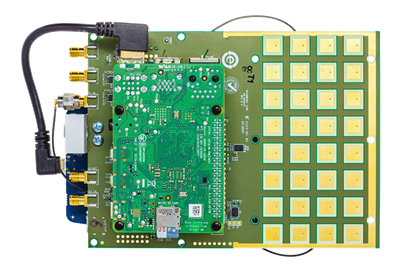
- EVAL-CN0566-RPIZ ($2500.00) Phased Array Development Platform
デバイス・ドライバ
コンポーネントのデジタル・インターフェースとを介して通信するために使用されるCコードやFPGAコードなどのソフトウェアです。
機能と利点
- 10GHz~10.5GHzのビームステアリング・プラットフォーム
- 360ºの位相シフト(2.8ºの分解能)
- 31dBの振幅調整範囲(0.5dBの分解能)
- 8エレメントのリニア・アレイ・アンテナ
- PlutoSDRによるデジタル処理
- Raspberry Pi上で直接実行
マーケット & テクノロジー
使用されている製品
参考資料
-
CN0566 User Guide2023/04/12WIKI
-
フェーズド・アレイ・システム開発入門ワークショップ2023/04/10
-
ラピッド・プロトタイピングを実現するためのソリューション2024/04/15PDF4 M
-
CN0566: フェーズド・アレイ開発プラットフォーム (Rev. 0)2023/04/12PDF1 M
-
アンテナの設計を簡素化するフェーズド・アレイ向けのビームフォーミングIC2019/01/01 アナログ・ダイアログ
回路機能とその特長
フェーズド・アレイ・ビームフォーミングは、20 世紀中頃からレーダーおよび通信システムで用いられてきました。近年では、これらのシステムは、5G モバイル通信、防衛レーダーおよび商用レーダー、衛星通信、車載アプリケーションなどの分野で広く利用されるようになっています。
フェーズド・アレイ・アンテナ(またはビームフォーミング・アンテナ)の放射パターンは電気的に操作可能で、2 つの無線機間での堅牢な通信リンクを確立できます。トランスミッタの電力は目的のレシーバに向けることができ、受信アンテナはトランスミッタに向けることができます。更に、干渉信号を除去するようレシーバのアンテナ・パターンのヌル点を配置でき、また、2 台の無線機が相互に移動してもリンクを維持できます。フェーズド・アレイの複雑さは、単純なリニア・アレイでの数個のエレメントから、平面型、円筒型、円錐型、およびその他の形状のアレイでの数千におよぶエレメントまで、非常に様々です。
フェーズド・アレイには、急峻な学習曲線、マイクロ波RFエレクトロニクスを含め広い範囲にわたる複数の技術および工学分野、連続および離散時間信号処理、組み込みシステム、A/D コンバータおよび D/A コンバータ、デジタル設計、コンピュータ・ネットワークなどの要素が含まれています。商用のフェーズド・アレイ・システムは通常、高価で、単一のアプリケーション用に構築されており、基本的な概念を調べる助けにはなりません。
図 1 に示す回路は、低コストで簡素なフェーズド・アレイ・ビームフォーミングの例を示すプラットフォームで、フェーズド・アレイ・アンテナの原理と応用を、実際に操作しながら学ぶことができます。この全機能を内蔵したシステムは、より複雑なシステムの概念実証やデバッグを行うのに理想的なツールです。また、ビームフォーミング、ビーム・ステアリング、アンテナ故障、周波数変調連続波(FMCW)レーダー、合成開口イメージングなど、高度なトピックについて調べそれを理解する機会を提供します。設計には、RF コンポーネントおよび信号処理ハードウェアが含まれており、また、10.0GHz~10.5GHz(X バンド)で動作するオンボード 8 エレメント・リニア・アレイ・アンテナが内蔵されています。この周波数範囲により、一般的な低コスト・モーション・センサー・モジュールをマイクロ波ソースとして使用できます。
この回路は、Raspberry Pi に直接実装するよう設計されており、低コストのソフトウェア無線(SDR)モジュールであるPlutoSDR を使用して中間周波数(IF)出力をデジタル化します。ソフトウェア・インターフェースは、Linux の産業用入出力(I/O)フレームワークを介しているため、デバッグおよび開発ユーティリティのホストや、Python、GNURadio、MATLAB に対応したクロスプラットフォームのアプリケーション・プログラミング・インターフェース(API)とすることができます。
アプリケーション・ソフトウェアは、Raspberry Pi 上でローカルに、あるいは、有線またはワイヤレスのネットワーク接続を介してリモートで、実行できます。システム全体は 5V、3A のUSB-C 電源アダプタ 1 個で給電されます。


回路説明
フェーズド・アレイ・ビームフォーミングは、無線通信、レーダー・システム、医療用画像処理などのアンテナ・アレイで用いられる信号処理手法です。ビームフォーミングには利点が多数あります。例えば、アンテナを目標物(トランスミッタ、レシーバ、またはレーダーの場合であれば追跡対象物)に直接指向させることができます。アンテナ・パターンのヌル点も、信号の干渉を回避するよう計画的に配置できます。
ビーム・パターンの形成には、複数のアンテナからの信号の同時送信あるいは同時受信も含まれます。フェーズ・シフトおよびゲイン調整がチャンネルごとに適用され、その後、それぞれのチャンネルは、アナログ領域またはデジタル領域のいずれか、あるいは両方の混合領域にまとめられます。位相シフタを調整して組み合わせた RFビームの方向を制御できるため、リアルタイムのビーム・ステアリングやビーム再構成が、アンテナを物理的に動かすことなく可能になります。メインのビーム幅やサイドローブ抑圧特性の調整は、アレイ・エレメントのゲイン(またはテーパリング)を調整することで可能です。
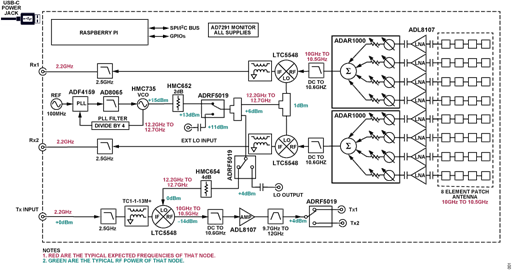
CN0566 のメイン・ボードは、8 エレメントのフェーズド・アレイ、ダウンコンバータ・ミキサー、局部発振器(LO)、デジタル制御回路を備えています。CN0566 の出力は、公称周波数が2.2GHz の 2 つの IF 信号であり、これらは PlutoSDR モジュールでデジタル処理されます。
ビームフォーミングの基本
図 2 および図 3 に、2 つの異なる方向からの波面を 4 個のアンテナ・エレメントが受信する例を示します。電気ビームは、受信経路に時間遅延を挿入しその後これら 4 つの信号を合算することにより、目標送信機の方向である左45ºに向けられています。
図 2 では、この時間遅延(45º のビームに設定)が、各エレメントに到達する波面の時間差と一致しています。この場合、適用した遅延により、4 つの信号は結合される時点で位相が揃う形で到達します。このように位相が揃って結合されることで、結合器の出力には大きな信号が生じます。

図 3 では、同じ遅延が適用されていますが、この場合は、アンテナ・エレメントに対し垂直に、対象外の(干渉原因となる)トランスミッタからの波面があります。この遅延が適用されていることで、4 つの信号の位相は不整合となり、結合器の出力は大幅に低減します。

フェーズド・アレイにおける時間遅延は、ビーム・ステアリングを行うために必要な、定量化可能な差分です。ビームを操作するための時間遅延は、エレメント間の増分伝搬距離(L)を波面が通過するのに要する時間に等しい量です。これは、図 4に示すように隣接エレメント間に正三角形を描くと最もわかりやすく可視化できます。

この図を参照し、直角が形成されることに注意すると、L の値は式 1 を用いて計算できます。

ここで、
L はエレメント間の伝搬距離の増分。
d はエレメント間の距離。
θ は電気ビーム角(機械的なボアサイトと電気的なボアサイトがなす角度)。
ビームを操作するための時間遅延は、波面が距離 L を通過するのに要する時間に等しい量です。そのため、時間遅延は式 2 を用いて計算できます。

ここで、
∆t はエレメント間の距離差に相当する遅延時間。
c は光速(3 × 108m/s)。
この式を電気的に操作するアンテナの方向について解くと次のようになります。
θ = sin‐1(Δt c/d)
しかし、時間遅延は、位相シフトを利用してもエミュレートできます。この方法は、多くのエミュレーションにおいて一般的かつ実際的なものとなっています。帯域幅が狭いシステムでは、時間遅延の代わりに位相遅延で置き換えることができます。位相遅延は式 3 を用いて簡単に計算できます。

ここで、
∆Φ はエレメント間の距離差に相当する位相シフト。
λ は信号の波長。
f は信号の周波数。
位相シフトに基づいて電気的なステアリング角を求めると次のようになります。
θ = sin‐1 (ΔΦ c / (2 π f d))
例として、2つのアンテナの間隔が 14mmである場合を考えます。10.3GHz の波面が機械的なボアサイトから 30º の角度をなして到達する場合、2 つのアンテナ間の最適な位相シフトはどのようになるでしょうか。
θ = 30° = 0.52 rad


ΔΦ = 1.53 rad = 87.4°
したがって、波面が θ = 30º で到達した場合、隣接エレメントの位相シフトは 87.4º となります。そのため、両エレメントの各信号は位相を揃えた形で重ねることができます。これにより、その方向のアンテナ・ゲインを最大化できます。
リニア・アレイのアンテナ・パターン
ステアリング角の他に、アンテナのすべてのゲイン・パターンを理解し操作すると便利です。アンテナ・パターンは、エレメントのファクタとアレイのファクタの組み合わせです。エレメント・ファクタはエレメントの放射パターンであり、そのエレメントの構造によって決まります。アレイ・ファクタは、各エレメントの位相と振幅をシフトすることで電気的に制御できるビーム・パターンです。
アレイ・ファクタは、アレイの配置(CN0566 の一様なリニア・アレイの場合は d)およびビームの重みづけ(振幅と位相)に基づいて計算できます。一様なリニア・アレイのアレイ・ファクタを抽出することは簡単ですが、詳細については、この回路ノート末尾に記載された参考資料を参照してください。
主な関心事が、ゲインが角度によってどう変化するか、ということにあるため、多くの場合、ユニティ・ゲインを基準に正規化したアレイ・ファクタをプロットすることが有用です。この正規化されたアレイ・ファクタは式 4 で表すことができます。

ここで、
AF は正規化したアレイ・ファクタ。
N はエレメント数。
θ0はビーム角。
ビーム角 θ0は、エレメント間の位相シフト∆Φ の関数として既に定義されているので、正規化されたアンテナ・ファクタは式 5 のように表すこともできます。

アレイ・ファクタの式で前提とした条件は次のとおりです。
- エレメントは等間隔に配置されている。
- エレメント間の位相シフトは等しい。
- エレメントの振幅はすべて同じ。
図 5 に、8 エレメント・アレイで d = λ/2、θ0 = 30º の場合のアレイ・ファクタを示します。


RF 設計
受信アンテナおよび LNA
レシーバをアンテナ・アレイに接続するのは簡単なことではありません。マイクロ波周波数では、ケーブルやコネクタが低コストであり、かつ長さが一致している必要があります。CN0566は、図 6 に示す、10GHz~10.5GHz で動作する 8 エレメントのパッチ・アンテナを内蔵することで、これらの懸念事項を除去しています。
各エレメントには 4 つのサブエレメントがあり、これらはプリント回路基板(PCB)パターンのウィルキンソン・スプリッタで均等に結合されるため、水平方向のビーム・パターンを狭くすることができます。4 分の 1 波長短絡スタブが静電放電(ESD)保護を行います。各エレメントは、10nF のコンデンサを介して、6GHz~18GHz、24dB ゲインの ADL8107 低ノイズアンプに容量結合され、オプションのサブミニチュア・プッシュオン(SMP)コネクタを使用すれば外部アンテナに接続できます。LNA はアレイの感度を増強し、マイクロ波源が低出力であっても鋭いビーム・パターンを可能にします。

図 7 に、オンボード・アンテナのゲインと周波数の関係を示します。−3dB 帯域幅は 9.9GHz~10.8GHz です。

ビームフォーマ
CN0566 のコアは、4 チャンネル、8GHz~16GHz、X バンドおよび Ku 帯ビームフォーマである ADAR1000 のペアです。ADAR1000 により、チャンネルごとに、2.8º の分解能で 360º の位相調整と、0.5dB の分解能で 31dB のゲイン調整が可能となります。2 個の ADAR1000 は、双方向、半二重動作が可能ですが、CN0566 では ADAR1000 の受信経路にのみ接続されています。図 8 に示すように、ADL8107 LNA の出力の位相および振幅はADAR1000 によってシフトされ、RFIO 出力で結合されます。
局部発振器/シンセサイザ
図 9 に示すように、ADF4159 フェーズロック・ループ(PLL)および HMC735 電圧制御発振器(VCO)が組み合わさり、10.5GHz~12.7GHz の範囲の周波数シンセサイザを形成しています。この信号を使用して、全ミキサーのLOポートを駆動できます。通信やその他の固定周波数アプリケーションのために、LO周波数は、通常、アンテナの目標信号より 2.2GHz 高い値に設定されます。したがって、LO は一般的に 12GHz~12.7GHz です。また、ADF4159は、レーダー・アプリケーション用に FMCW ランプすなわち「チャープ」を生成することもできます。ADF4159 では、チャープのランプ・レートおよび形状には、鋸波、三角波、放物線波形などを含め様々なものが可能です。
また、オンボード・シンセサイザを無効化して、外部 LO を LO入力 SMA コネクタに印加することもできます。これにより、CN0566 を外部無線に同期させたり、複数の CN0566 ボードを1 つの LO に同期させたりすることができます。オンボードで生成するか、外部生成するかによらず、局部発振器は図 1 に示すように、モノリシック・マイクロ波集積回路(MMIC)スプリッタまたは結合器を用いて、2 つの受信ミキサー、および、オンボードの送信経路あるいはLO出力ポートのいずれかに分割できます。

ミキサーおよびフィルタリング
ADAR1000 の RFIO 出力は、図 10 に示すように、10.6GHz ローパス・フィルタを通過し、LTC5548ミキサーのRFポートに入力されます。

ローパス・フィルタは、ミキサーのハイサイド・イメージ(図 10の場合 12.2GHz + 2.2GHz = 14.4GHz に現れる)と LO の再放射(12.2GHz)を除去します。LTC5548 ミキサーは、2.5GHz のローパス・フィルタでフィルタリングされた 2.2GHz の IF を出力します。
図 11 に、受信信号経路(ADL8107 + ADAR1000 + 10.62GHzローパス・フィルタ + LTC5548 + 2.5GHz ローパス・フィルタ)の測定結果を示します。これは、LO が 12.2GHz、アンテナ入力が 10GHz、IF が 2.2GHz の場合のものです。なお、12.2GHz と14.4GHz は、PlutoSDR の入力帯域幅により更に減衰され、M1~M4 のマーカで示すように約 56dBc の SFDR になります(−23dBm + 79dBm = 56dBc)。

トランスミッタ信号経路
CN0566 のビームフォーミング・セクションは受信専用ですが、外部アンテナを駆動するために送信出力が可能です。アンテナ・パターン測定のために、アンテナを様々な角度でアレイに向かい合わせることができます。送信の周波数は、オンボードLO から取り出した場合には正確にわかっているため、デジタル信号処理が簡単なものになります。CN0566 をドップラーおよびFMCW レーダー・アプリケーションで用いる場合、トランスミッタは、対象物を照射するために用いることもできます。
図 12 に示すように、トランスミッタの信号経路は、送信入力サブミニチュア・バージョン A(SMA)コネクタから始まり、2 つの送信出力 SMA コネクタ TX1 と TX2 を通じて別の送信アンテナに出力されます。


送信入力は一般に受信 IF(約 2.2GHz)と同じ周波数です。この送信入力は、連続波、変調された通信、あるいはレーダー信号とすることができます。多くのSDR(PlutoSDRのSDRを含む)の出力は、矩形波の LO を用いるため、LO 周波数の高調波が発生します。そのため、送信入力信号はまず、ローパス・フィルタを通過する必要があります。図13に、2.1GHzトーンに対するPlutoSDR の送信出力(フィルタなし)を示します。


2.5GHz ローパス・フィルタを通過した後は、ノイズ・フロアを超えて現れるのは基本波信号のみとなります。この「クリーン・アップされた」信号は、LTC5548 の IF に供給され、10GHz~10.3GHz にアップコンバートされます。
この 10GHz~10.3GHzの RFは、その後 10.6GHz ローパス・フィルタによってフィルタリングされ、更に 24dB LNA であるADL8107 によって増幅されて、最終的に 9.7GHz~11.95GHz のフィルタによってバンドパス・フィルタ処理されます。図 14 に、フィルタリング処理のないミキサー出力を示します。

図 15 に、増幅とバンドパス・フィルタ処理を行った後の送信出力を示します。

仮想アレイ
CN0566 は、レーダー・システムで最も広く用いられている手法である、仮想アレイでも用いることができます。このモードでは、2 つのトランスミッタ出力が用いられ、各トランスミッタは受信アレイから異なる距離に配置されます。図 16 に示すように、送信出力は、プログラマブルな PLL チャープ数の最後でトグルされます。その後データが結合され、受信エレメント数が2 倍あるかのように見える仮想アレイが生成されます。そのため、受信ビームは狭くなりますが、データを収集するのに必要な時間は 2 倍になります。

送信アンテナ・スイッチングはプログラマブルな PLL チャープ数の最後でトリガされます。ADF4159 の MUXOUT ピンはランプの最後を指示するようプログラムでき、図 17 に示すように、この信号がレベル・シフトされて、7 段のリップル・カウンタのクロック入力に印加されます。Raspberry Pi からの 3 個の汎用入出力(GPIO)信号がデータ・マルチプレクサの入力を駆動して、アンテナのトグル・レートを 2、4、8、16、32、64、128チャープの中から選択します。

デジタル制御およびレベル・シフト
Raspberry Pi 4 プラットフォーム・ボードは、シリアル・ペリフェラル・インターフェース(SPI)、I2C、ディスクリート・デジタル I/O 制御信号のすべてに対応します。Raspberry Pi のロジック・レベルは 3.3V で、これを直接使用することも、ADAR1000 および ADF4159 とインターフェースするために 1.8Vにレベル・シフトすることもできます。電源ピンを Raspberry Piの 3.3V ロジック電源と 1.8V のデジタル電源に直接接続した、2 個の電源レベル変換器が用いられています。これにより、給電されていない場合にデバイスのデジタル・ピンが高ロジック・レベルとなることはありません。
ADF4159 MUXOUT は、PLL ロック・インジケータおよびFMCW モードでのランプ終了インジケータとしても機能します。3.3V にレベル・シフトされた方の MUXOUT は、PLL ロック状態を示す LED インジケータを駆動します。
電源アーキテクチャ
CN0566 は、5V、3A の電力を供給する 1 個の USB-C レセプタクルから直接電力を引き出します。この電力は 40 ピンの拡張ヘッダを介して Raspberry Pi に送られる他、その他のオンボード・パワー・マネージメントにも送られます。図 18 に CN0566 の電源ツリーの全体図を示します。

LTC4217 集積化ホット・スワップ・コントローラを用いると、起動時の負荷電源への突入電流が制限され、CN0566 を安全に挿抜できます。また、IMON 出力を介してボードの消費電力を測定できる、便利な手段が提供されます。
LT8609S は固定周波数電流モードのモノリシック降圧 DC/DC コンバータです。このデバイスは、5Vの入力電圧を3.3Vに降圧します。その後、この出力は ADP7158 LDO に供給され、このLDO が 3.3V でビームフォーマ、LNA、ミキサー、スイッチ、ADC に給電します。
ADM7150 LDO は、デジタル・レベル変換器および ADF4159 に1.8V のアナログ電源レールを供給します。
ADM7170 は、低静止電流の低ドロップアウト・リニア電圧レギュレータで、HMC735 VCO に給電します。この大出力電流LDO は、ADC および DAC 回路、高精度アンプ、PLL/VCO、クロック用 IC など、ノイズに敏感なアプリケーションでのレギュレーションに最適です。
LT3460 昇圧 DC/DC コンバータおよび ADP7118 LDO は 5V の入力電圧を 15V に昇圧し、その後 14V にレギュレーションします。この電圧は AD8065 アンプの電源として用いられます。このアンプは、固定周波数電流モードの制御方式を用いて、ライン・レギュレーションおよび負荷レギュレーションを行います。ADP7118 は、CMOS の低ドロップアウト・リニア電圧レギュレータで、高い電源電圧変動除去比を実現し、シンセサイザの位相ノイズを最小限に抑えます。
システムのモニタリングと制御
温度センサーを内蔵した 8 チャンネル、I2C、12 ビットの逐次比較レジスタ(SAR)ADC である AD7291 を用いることで、システムの診断機能を拡張できます。すべての電源電圧および VCOチューニング電圧がモニタされます。AD7291 の入力範囲は 0V~2.5V で、抵抗分圧器により測定電圧データが適切にスケーリングされます。このADCは ADAR1000の近くに配置され、ボードの温度上昇のおおよその値を測定します。測定対象のパラメータとスケーリング・ファクタを表 1 に示します。
| AD7291 Input | Parameter | Divider Scale Factor |
| VIN0 | 1.8 V supply | 2 V/V |
| VIN1 | 3.0 V supply | 2 V/V |
| VIN2 | 3.3 V supply | 2 V/V |
| VIN3 | 4.5 V supply | 4.01 V/V |
| VIN4 | Supply of AD8065 amplifier | 7.98 V/V |
| VIN5 | Input voltage | 4.01 V/V |
| VIN6 | Current monitor output of LTC4217 | 1 A/V |
| VIN7 | Control voltage and modulation input of HMC735 | 7.98 V/V |
システム性能
理想的には、ビームフォーミング・アレイは、必要な角度方向に向けられており、また、与えられたエレメント・テーパーに対してできるだけ理論値に近い形状を持つビームを生成します。例えば、すべてのエレメントをゲインが同じで位相シフトがないように設定すると、ビームの角度は 0º(機械的なボアサイト)となり、プロファイルは SIN(X)/Xすなわち SINC1 となります。三角形プロファイルの外側のエレメントのゲインを減らすとSINC2 プロファイルとなり、エレメント間の位相シフトを累進的に増加させると、ビームは機械的なボアサイトからずれていきます。
正確なビームを生成する能力は、各エレメントのゲインと位相を正確に設定する能力に依存します。CN0566 には、避けることのできないゲイン誤差源および位相誤差源がいくつかあります。
- エレメント間のばらつき(多くの場合、比較的小さな誤差源です)。
- ADAR1000 固有のゲイン誤差および位相誤差。
- 2 つの ADAR1000 の間のばらつき。
- LO スプリッタ、ミキサー、フィルタ、その他受動部品を含む、2 つの受信経路の間のばらつき。
- レシーバ・チャンネル(PlutoSDR あるいはその他の SDR モジュール)間のばらつき。
システム・キャリブレーション
こうした誤差は回避できないため、CN0566 のソフトウェアには、キャリブレーション・スクリプトが含まれています。外部のマイクロ波源またはオンボードの送信出力のいずれかをアンテナに接続して、アレイから約 1 メートルの位置の機械的なボアサイトに配置します。キャリブレーション・スクリプトは次の動作を実行します。送信チャンネルのばらつきを測定し、補償します。これにより、ADAR1000 の 7 ビット・ゲイン制御のすべてを、送信チャンネルのばらつきを補償するのではなく、ビームのテーパリングを正確に行うために利用できます。この手順は次のとおりです。
- すべての ADAR1000-0 のチャンネルの位相をゼロ、ゲインをミッドスケールに設定し、すべての ADAR1000-1 のチャンネルを最低ゲインに設定します。受信チャンネル・ゼロの RF信号強度を測定します。ADAR1000-0 のゲインをゼロに設定して同じことを繰り返します。
- 平均のばらつきが最小となるようにするには、2 つの受信チャンネルの低い方のゲインをどれだけ増加させなくてはならないかを、デシベル単位で計算します。
- これらの値をチャンネル・キャリブレーション・ファイルに保存します。
図 19 は、補償前のアレイ内の各エレメントの相対信号強度を示すものです。エレメント間の最大ばらつきは 11.2dB です。なお、強度は、定性的に、4 つのエレメントからなる 2 グループにわかれている点に注意してください。これは、2 つのチャンネル間でばらつきがあることを示唆しています。

次に、以下の手順に従い、エレメントのゲインに残るばらつきを測定し、補償します。
- エレメント 0 を最大ゲインに設定し、他のエレメントを最小ゲインに設定します。RF 信号強度を測定します。
- 1 つのエレメントを最大ゲインにし、他のエレメントを最小ゲインに設定して、残りのエレメントについて同じことを繰り返します。RF 信号強度を測定します。
- 最小ゲインのエレメントを特定します。その最小ゲインのエレメントのゲインと同じにするために他のエレメントのゲインをどれだけ下げる必要があるかを計算します。
- これらの減少係数を 1 を基準に正規化し、目的のビーム・テーパーにこの減少係数を乗ずることができるようにします。
- これらの値をゲイン・キャリブレーション・ファイルに保存します。
図 20 は、キャリブレーション後の信号強度を示します。最大ばらつきは 0.51dB です。

次に、以下の手順に従い、隣接エレメント間の位相の不一致を測定し、補償します。
- エレメント 0 と 1 を、チャンネルとゲイン・キャリブレーション係数を考慮した最大ゲインに設定します。
- エレメント 0 の位相をゼロに設定し、次にエレメント 1 の位相を 0º から 360º まで順次変えて行き、そのたびに信号強度を測定します。
- 位相は、信号強度が最大となった場合に整合しています。ただし、エレメントの位相が 180º 異なっている場合のヌル点を特定する方がはるかに容易です。
- そのヌル点の位相に180ºを加えます。これは、その位相不一致を補償するためにエレメント 1 に加算する必要のある位相です。
- 隣接ペア・エレメントにこれを繰り返します(1-2、2-3、3-4など)。
- エレメント 0 のゼロ補償から始めて、連続する隣接エレメントの補償値を追加していきます。その結果、アレイ全体に適用できる値のリストが作成できます。
- これらの値を位相キャリブレーション・ファイルに保存します。
図 21 に、ゲインと隣接エレメント間の位相差を示します。理想的にはすべてのヌル点は±180º になるはずです。

キャリブレーション後のアレイ全体のゲインと位相の精度は、ゲイン分解能が調整範囲 31dB で 0.5dB 以上、位相分解能が 2.8º以上という、ADAR1000 自体の分解能に近づきます。
バリエーション回路
CN0566 は、追加のボードを順次隣に配置して行くことで水平(方位角)方向に拡張できます。それによって、より狭いビームを生成できます。全ボードに共通のLOを用いる必要があります。また、ボードあたり 2 つの同期入力を持つ SDR レシーバを用いて、IF 出力をデジタル処理する必要があります。
単パルス・トラッキングやハイブリッド・ビームフォーミングが不要な場合は、複数の ADAR1000 の出力をパッシブ結合器と組み合わせ、シングルチャンネル ADC(PlutoSDR の単一 RX 入力など)によってデジタル処理できます。
オプションの SMP RF コネクタを介すことで、外部 8 チャンネル・アンテナを CN0566 で使用できます。約 8GHz~14GHz の動作範囲であれば、それに応じてオンボード・スプリッタ、ローパス・フィルタ、バンドパス・フィルタを変更することで、どの周波数プランも実行できます。
半二重(送信および受信)アプリケーションの場合は、ADTR1107 が 6GHz~18GHz の RF フロントエンドです。このデバイスには、ゲインが 18dB、ノイズ指数が 2.5dB の受信 LNAと、PSATが 25dBm の送信アンプが内蔵されており、送信と受信の切替え速度は 22ns です。
ADAR1000EVAL1Z X/Kuフェーズド・アレイ・リファレンス設計は、32 チャンネル半二重ビームフォーミング・フロントエンドで、10GHzに対応する格子間隔のアンテナを備えています。ADXUD1AEBZアップ/ダウン・コンバータ・ボード、EVAL-AD9081 ミックスド・フロントエンド評価用ボード、およびサポートされる FPGA 開発プラットフォームと組み合わせた場合、フル機能のレーダーおよび通信システムのプロトタイプを作製できます。
ADAR3000 は、17GHz~22GHz、ADAR3001 は 27.5GHz~31GHzのアプリケーション用 16 チャンネル・ビームフォーマです。これらのデバイスは、送信または受信のいずれかに設定でき、(位相調整ではなく)時間遅延を行い、広帯域アプリケーションでのビーム・スクイントを除去します。
ADAR4002 は、周波数範囲が 0.5GHz~19GHz のシングルチャンネル双方向ビームフォーマです。このデバイスは、0ps~508ps(4ps の分解能)または 0ps~254ps(2ns の分解能)の遅延時間が設定可能で、0.5dB の分解能で 6 ビット分の減衰が可能です。
回路の評価とテスト
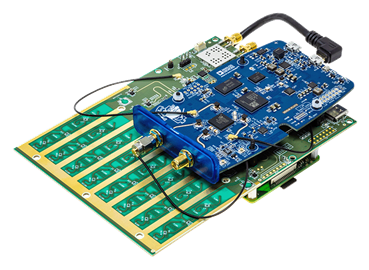
このセクションでは、EVAL-CN0566-RPIZ を評価するためのセットアップと手順を説明します。セットアップの全容やその他の重要な情報については、CN0566 ユーザ・ガイドを参照してください。
必要な装置
- 以下を含む CN0566 キット:
- Raspberry Pi 4 および PlutoSDR を装着した EVAL-CN0566-RPIZ
- USB - microUSB 変換ケーブル
- アナログ・デバイセズの Kuiper Linux イメージを書き込んだ SD カード
- 5V、3A、USB-C AC アダプタ
- 10GHz のマイクロ波源(モーション・センサー)
- 三脚
スクリプトを Raspberry Pi 上でローカルに実行するためには以下が必要です。
- HDMI 付きディスプレイ・モニタ
- Micro-HDMI - HDMI 変換ケーブル
- USB キーボードおよびマウス
スクリプトをリモートのホスト・コンピュータ上で実行するためには以下が必要です。
- MATLAB または Python IDE がインストールされたWindows、Linux、または Mac コンピュータ
- イーサネット・ケーブル
開始にあたって
CN0566 ユーザ・ガイドに記載の手順に従って、Kuiper Linux の書き込まれた SD カードを CN0566 用に設定します。この SDカードを Raspberry Pi の SD カード・スロットに挿入します。
セットアップとテスト
図 22 に示す接続図を参照してください。

- 用意したケーブルを用いて、PlutoSDR の中央の micro-USBコネクタを Raspberry Pi のいずれかの USB ポートに接続します。
- 三脚を三脚用ネジ穴に慎重にねじ込みます。
- USB-C AC アダプタを EVAL-CN0566-RPIZ の USB-C 電源ジャックに差し込みます。
- 単三電池 2 個あるいは 3V 電源を用いてマイクロ波源を起動します。マイクロ波源をアンテナ・アレイの方向に向けます。
Python の例を Raspberry Pi 上で直接実行するには、以下の手順に従います。
- 電源コネクタに最も近い Raspberry Pi の HDMI 出力を、HDMI ケーブルを介してモニタに接続します。
- USB キーボードおよびマウスを Raspberry Pi の USB ポートに接続します。
- ターミナルを開き、cn0566_find_hb100.py スクリプトを実行します。
- スペクトルのグラフが単一の明確なトーンを示していることを確認します。「y」と入力し、Enter キーを押して周波数を保存します。
- cn0566_gui.py を開き、[RUN]ボタンをクリックします。GUI画面で[Auto Refresh Data]チェック・ボックスにチェック・マークを入れ、[Acquire Data]ボタンをクリックします。ビーム・パターンを観察します。
MATLAB の例をホスト・コンピュータ上で実行するには、以下の手順に従います
- イーサネット・ケーブルを用いて、Windows、Mac、またはLinux ホスト・コンピュータを Raspberry Pi に接続します。
- MATLAB を開き、phaser_hb100_scan.m スクリプトを実行します。
- phaser_rxtx.m スクリプトを実行し、ビーム・パターンを観察します。