概要
アナログ・デバイセズ は、集積度の高いRFアジャイル・トランシーバICを提供しています。この種の製品は、MDAS(Multi-service Distributed Access System) やスモールセルなど、携帯電話基地局で使われるSDR( ソフトウェア無線) 1のアーキテクチャでよく使用されていますが、それ以外にも注目すべき用途があります。現在、産業/民生/軍事分野では無人航空機(UAV) が利用されるケースが増えてきました。このUAVにおけるワイヤレスHD(高精細)ビデオ伝送にも、RFアジャイル・トランシーバICが活用されているのです。本稿のテーマは、集積度の高いトランシーバIC「AD9361」、「AD9364」2、3を使用した広帯域ワイヤレス・ビデオ伝送です。このアプリケーションに関して、シグナル・チェーンの構成、やり取りされるデータ量、RF占有信号帯域幅、通信距離、トランスミッタの送信パワーなどの話題を取り上げます。また、OFDM(直交周波数分割多重方式)の物理層の実現方法について述べるほか、RF信号の干渉を回避するための周波数ホッピングに関するテスト結果も示します。最後に、広帯域ワイヤレス・アプリケーションにおけるWi-FiトランシーバとRFアジャイル・トランシーバの長所と短所について考察します。
シグナル・チェーン
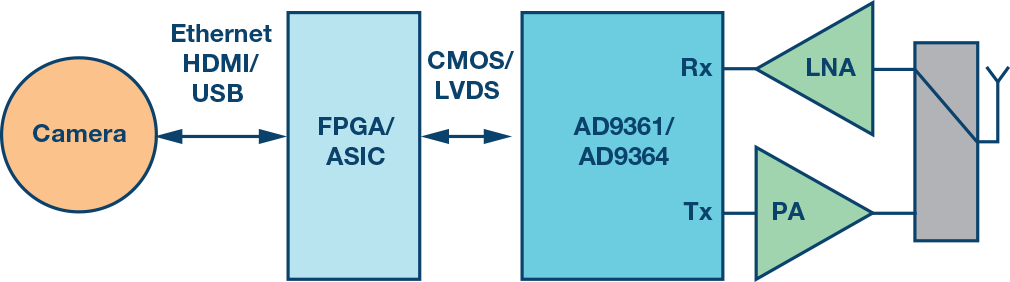
図1は、AD9361/AD9364とベースバンドICを使って構成したワイヤレス・ビデオ伝送システムの概略図です。カメラによって映像を取得し、そのデータをイーサネットやHDMI、USBなどのインターフェースを介してベースバンドICのプロセッサに送ります。映像のコーディング/デコーディングはFPGAなどのハードウェアで行うことができます。RF対応のフロント部には、スイッチャ、LNA( 低ノイズ・アンプ) 、PA( パワー・アンプ)、そして集積度が高くプログラムが可能なトランシーバICが含まれています。
どれくらいのデータ量を伝送するのか
表1は、非圧縮データレートと圧縮データレートでどれだけデータ量に差があるのかを示したものです。H.265またはMPEG-H Part 2としても知られるHEVC(高効率ビデオ・コーディング)を使用すれば、データレートを下げて帯域幅を抑えることができます。現在ビデオ・コンテンツの録画/圧縮/配信に最もよく利用されている方式の1つにH.264があります。HEVCはビデオ圧縮のあり方を大きく前進させるものであり、広く使用されているAVC(H.264またはMPEG-4 Part 10)の後継となり得る有望な技術です。

表1には、さまざまなビデオ伝送方式について、圧縮した場合、非圧縮の場合のデータレートがまとめられています。ここでは、ビデオのビット深度が24ビット、フレーム・レートが60fps(フレーム/秒)であると仮定しています。1080pを例にとると、圧縮後のデータレートは14.93Mbps( メガビット/秒) です。したがって、ベースバンド・プロセッサとワイヤレスの物理層で容易に処理することができます。
表1. 圧縮データレート
| 方式 | 水平方向 | 垂直方向 | ピクセル(画素数) | 非圧縮データレート〔Mbps〕 |
圧縮データレート 〔Mbps〕 圧縮率は200 |
| VGA | 640 | 480 | 307,200 |
442 | 2.2 |
| 720p | 1280 | 720 | 921,600 |
1328 | 6.64 |
| 1080p | 1920 | 1080 | 2,073,600 |
2986 | 14.93 |
| 2k | 2048 | 1152 | 2,359,296 |
3400 | 17.0 |
| 4k | 4096 | 2160 | 8,847,360 |
12,740 | 63.7 |
信号の帯域幅
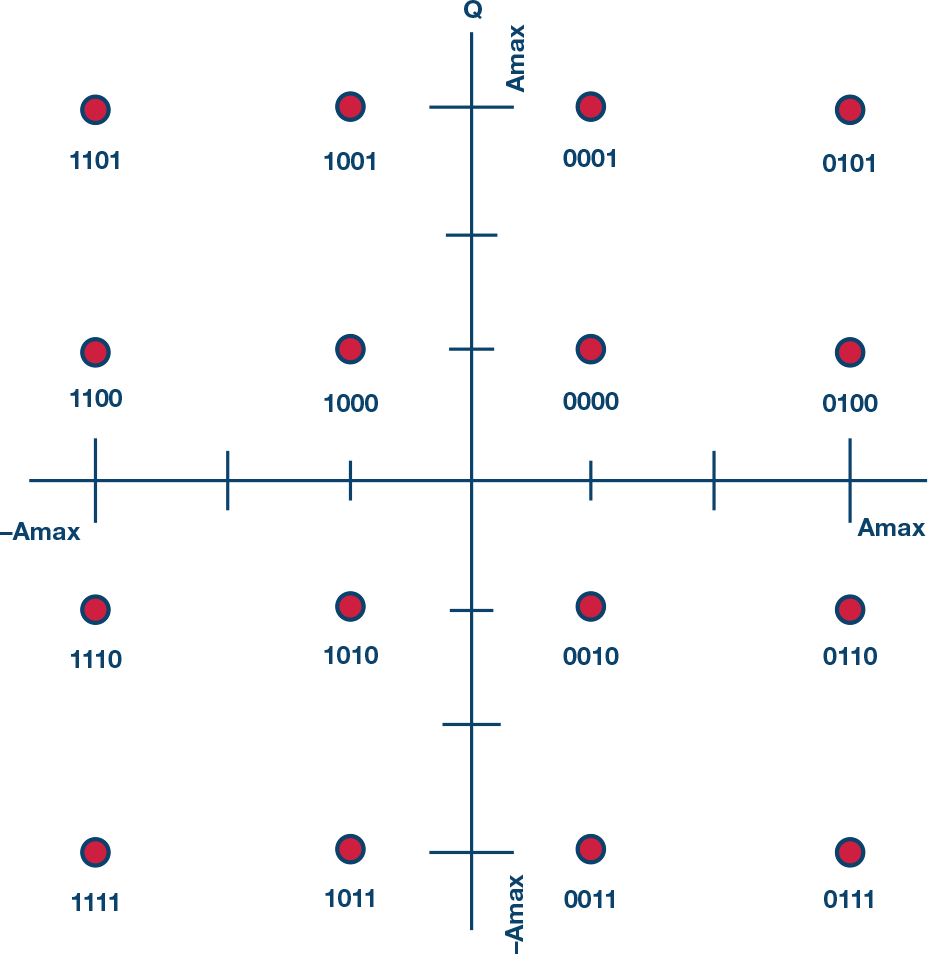
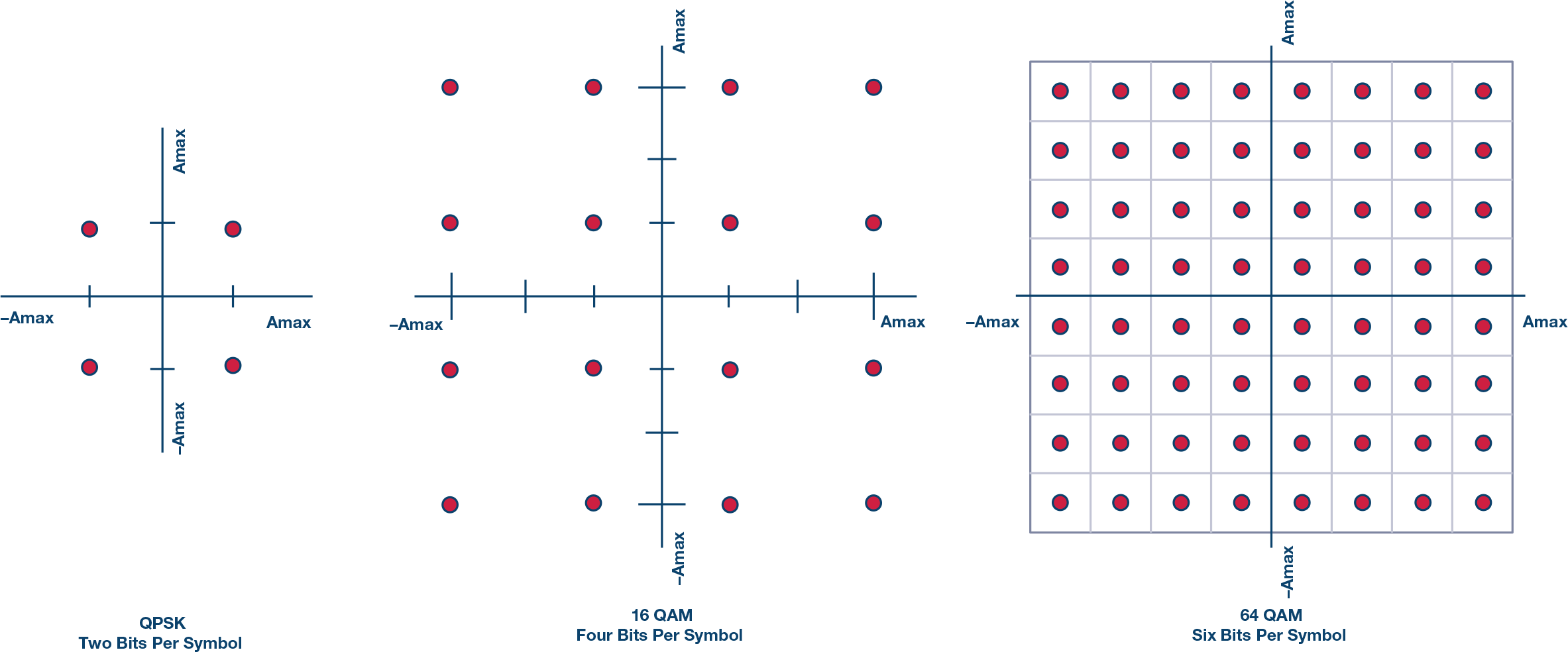
AD9361/AD9364では、サンプル・レート、デジタル・フィルタ、デシメーションの仕様を変更することにより、200kHz以下から56MHzまでのチャンネル帯域幅をサポートします。AD9361/AD9364は、複素データを送信するためのIチャンネルとQチャンネルを備えるゼロIFトランシーバです。複素データには実部と虚部があり、それぞれがIとQに対応します。これら2つのチャンネルが同じ周波数帯域で扱われるのでスペクトル効率は通常の2倍になります。圧縮ビデオ・データをI / Q の各チャンネルにマッピングすると、シンボルとして知られるコンスタレーション・ポイントが構成されます。図2に示したのは16QAM(Quadrature Amplitude Modulation)の例です。各シンボルは4ビットで表されます。
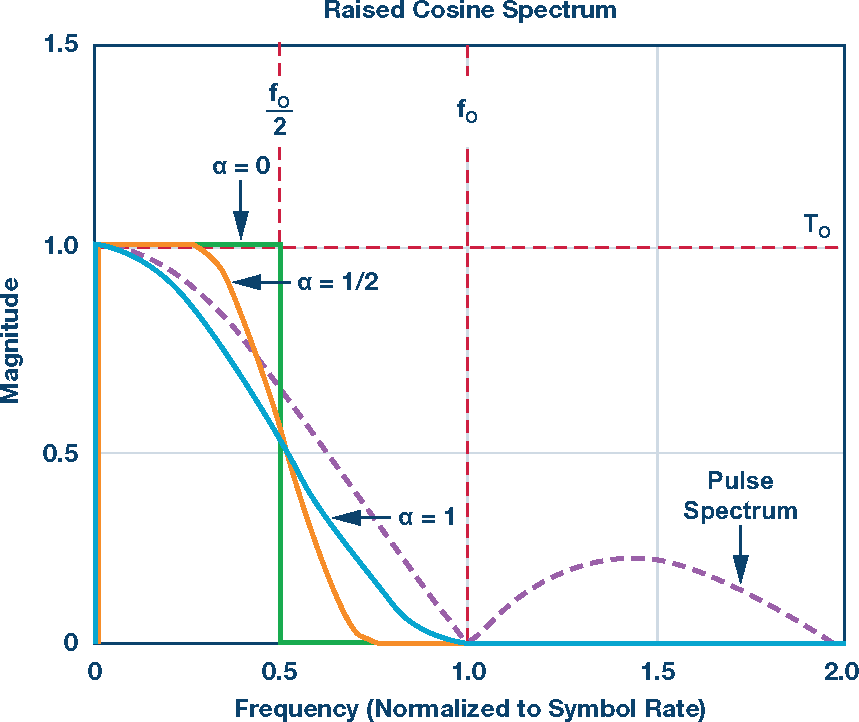
シングルキャリア(単一搬送波)のシステムの場合、限られた帯域内に収まるよう送信信号の整形を行うために、D/Aコンバータ(DAC) の前段で、I /Qのデジタル波形をパルス整形フィルタに通す必要があります。パルスの整形にはFIRフィルタが使用され、その応答は図4に示したようなものになります。情報の忠実度(fidelity) を維持するために、シンボル・レートに対応する信号帯域幅の最小値が決められます。シンボル・レートは、以下の式に示すように、ビデオの圧縮を行う場合のデータレートに比例します。OFDMに対応するシステムでは、複素データがIFFT(逆高速フーリエ変換)によってサブキャリアに変調され、そのサブキャリアによって制限帯域内の信号が送信されます。

各シンボルで送信されるビット数は、変調の次数に応じて異なります。

ここで、αはフィルタ帯域幅のパラメータです。
上に示した式から次式を導くことができます。

この式から、表2にまとめたようにRF占有信号帯域幅を求めることができます。
表2. 異なる変調次数に対するRF占有信号帯域幅(α=0.25)
| 方式 | 圧縮データレート 〔Mbps〕 |
QPSKの信号帯域幅 〔MHz〕 |
16QAMの 信号帯域幅 〔MHz〕 |
64QAMの 信号帯域幅 〔MHz〕 |
| VGA | 2.2 | 1.375 | 0.6875 |
0.4583 |
| 720p | 6.6 | 4.1250 | 2.0625 |
1.3750 |
| 1080p | 14.9 | 9.3125 | 4.6563 |
3.1042 |
| 2k | 17.0 | 10.6250 | 5.3125 |
3.5417 |
| 4k | 63.7 | 39.8125 | 19.9063 |
13.2708 |
AD9361/AD9364の最大信号帯域幅は56MHzです。両製品は、表2に示す全てのビデオ伝送方式だけでなく、より高いフレーム・レートにも対応します。変調の次数を上げると占有帯域幅は狭くなり、シンボルにおけるビット当たりの情報量は増加します。ただし、正しく復調を行うためには高いS/N比が必要になります。
通信距離とトランスミッタのパワー
UAVなどのアプリケーションでは、最大通信距離が非常に重要なパラメータになります。それほど長い通信距離は求められないケースもありますが、そうした場合でも、通信が遮断されないことが非常に重要になります。信号は、(自由空間での減衰とは別に)酸素や水などの障害物によって減衰する可能性があります。
図6に示したのは、ワイヤレス通信チャンネルにおける損失のモデルです。
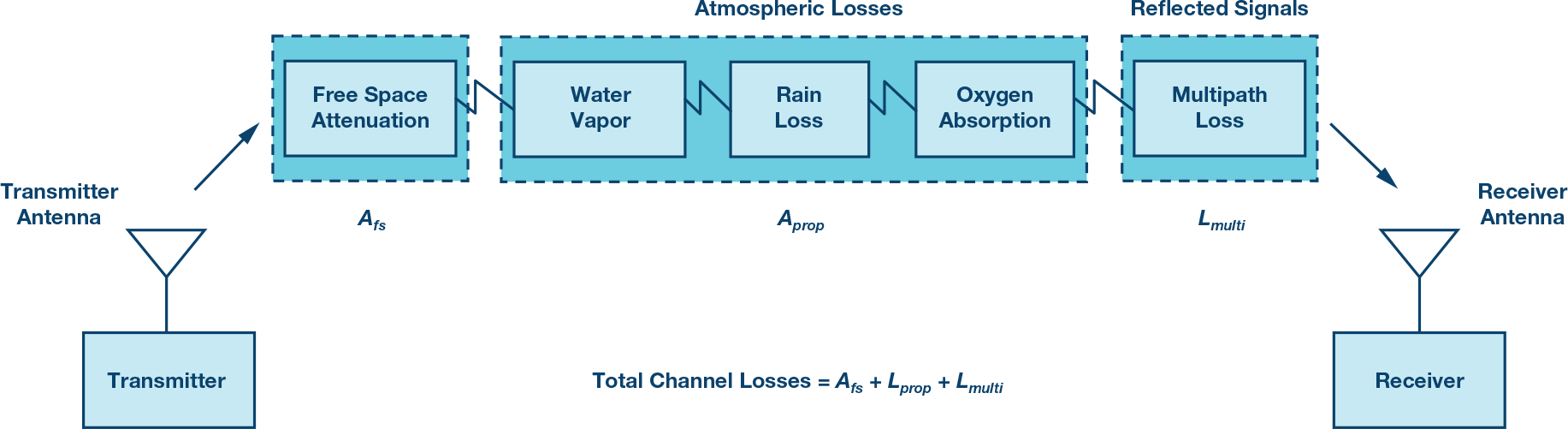
通常、レシーバの感度は、トランスミッタからの情報を復調またはリカバーするために必要な最小入力信号Sminとして定義されます。レシーバの感度が得られたら、以下に示すように、いくつかの仮定に基いて最大通信距離を算出することができます。

ここで、各変数の意味は以下のとおりです。
(S/N)min:信号を処理するために必要な最小のS/N比
NF:レシーバのノイズ指数
k:ボルツマン定数(1.38 × 10–23 joule/k)
T0:レシーバの入力部の絶対温度(ケルビン温度)
B:レシーバの帯域幅(単位はHz)
(S/N)minは変復調の次数によって異なります。S/N比が同じである場合、変調次数の低い方がシンボル・エラーは少なくなります。シンボル・エラーが同等である場合、変調次数が高い方が復調するためにより高いS/N比を必要とします。トランスミッタがレシーバからかなり離れている場合には信号が弱くなります。したがって、そのS/N比では高次の復調に対応できないということが起こります。トランスミッタを稼働させたまま、あるビデオ方式で同じデータレートを維持するためには、ベースバンド部において帯域幅の拡張と引き換えに変調の次数を下げるべきです。そうすることで、受信した画像が不鮮明にならないようにします。幸い、デジタル変復調の機能を備えるSDRでは、変調方式を変更することが可能です。先述した分析内容は、トランスミッタのRFパワーが一定であるという仮定に基づいています。アンテナのゲインを変えずにRF送信パワーを大きくすると、レシーバの感度を高めなくても、より遠くで信号を受信できます。ただし、最大送信パワーについてはFCC/CEの放射に関する規格に準拠しなければなりません。
また、通信距離はキャリア周波数に依存します。波が空間を伝搬する際には分散による損失が生じます。自由空間における損失は次式によって求められます。

ここでRは距離、λは波長、fは周波数、Cは光速です。この式から、自由空間において通信距離が一定だとすると、周波数が高いほど損失が大きくなることがわかります。例えば、通信距離が同じであるとすると、キャリア周波数が5.8GHzの場合の減衰は、同2.4GHzの場合と比べて7.66dB以上大きくなります。
RF周波数とスイッチング
AD9361/AD9364は70MHz~6GHzの周波数範囲に対応しています。具体的にどの周波数を使用するかはプログラムによって選択可能です。このような周波数範囲に対応していることから、1.4GHz、2.4GHz、5.8GHzなど、免許が必要/ 不要な周波数を含むほとんどのNLOS(Non Line-of-Sight:見通し外)周波数アプリケーションで利用できます。
2.4GHzの周波数帯は、Wi-Fi、Bluetooth、IoT( Internet of Things)向けの短距離通信に広く使用されており、非常に混雑しています。この周波数帯をワイヤレス・ビデオ伝送と制御信号の通信に使用すると、信号が干渉したり、不安定になったりする可能性が高まります。言うまでもなく、これはUAVにとって望ましいことではなく、危険な状態に陥る可能性があります。そこで使用されるのが、周波数スイッチングという手法です。これは、干渉などが生じないクリーンな周波数を使える状態を維持することで、データや制御信号の通信を信頼性の高い状態に保つというものです。トランスミッタは、周波数帯が混雑していることを感知したら、他の周波数帯を使用するように自動的に切り替えを行います。例えば、近接する周波数を使用して運用されている2 機のUAVは、互いの通信に対して干渉を及ぼします。その場合、自動的にLO( 局部発振) 周波数を切り替えて周波数帯を選択し直すことにより、安定したワイヤレス・リンクを維持することができます。稼働中にキャリア周波数やチャンネルを柔軟に選択できる機能は、ハイエンドのUAVにふさわしいものだと言えます。
周波数ホッピング
電子対抗手段(ECM:Electronic Countermeasures)では、高速周波数ホッピングが広く使用されています。これも干渉を回避する手段として有用です。通常、周波数ホッピングを行う場合には、一連の処理を実施した後にフェーズ・ロック・ループ(PLL)を再ロックする必要があります。その際には、周波数に関するレジスタへの書き込み時間、VCO(電圧制御発振器)のキャリブレーション時間、PLLロック時間が必要になります。そのため、周波数ホッピングには数百μs程度の時間がかかります。図7は、トランスミッタのLO周波数を816.69MHzから802.03MHzにホッピングする例を示したものです。通常、AD9361は周波数を変更可能なモードで使用されます。トランスミッタのRF出力周波数は、10MHzの周波数を基準として814.69MHzから800.03MHzにジャンプします。周波数ホッピングにかかる時間は、図7に示すようにシグナル・ソース・アナライザ(Keysight Technologies社の「E5052B」) を使うことでテストできます。図7 (b) の結果から、VCOのキャリブレーションとPLLのロックにかかる時間は約500μsです。このように、シグナル・ソース・アナライザを使えば、PLLの過渡応答を捉えることができます。図7 (a) は広帯域モードにおける過渡応答の測定結果です。図7(b)と図7(d) は、周波数ホッピングによる周波数および位相の過渡応答をかなり高い解像度で示したものです6。図7(c)は出力パワーの応答を表しています。
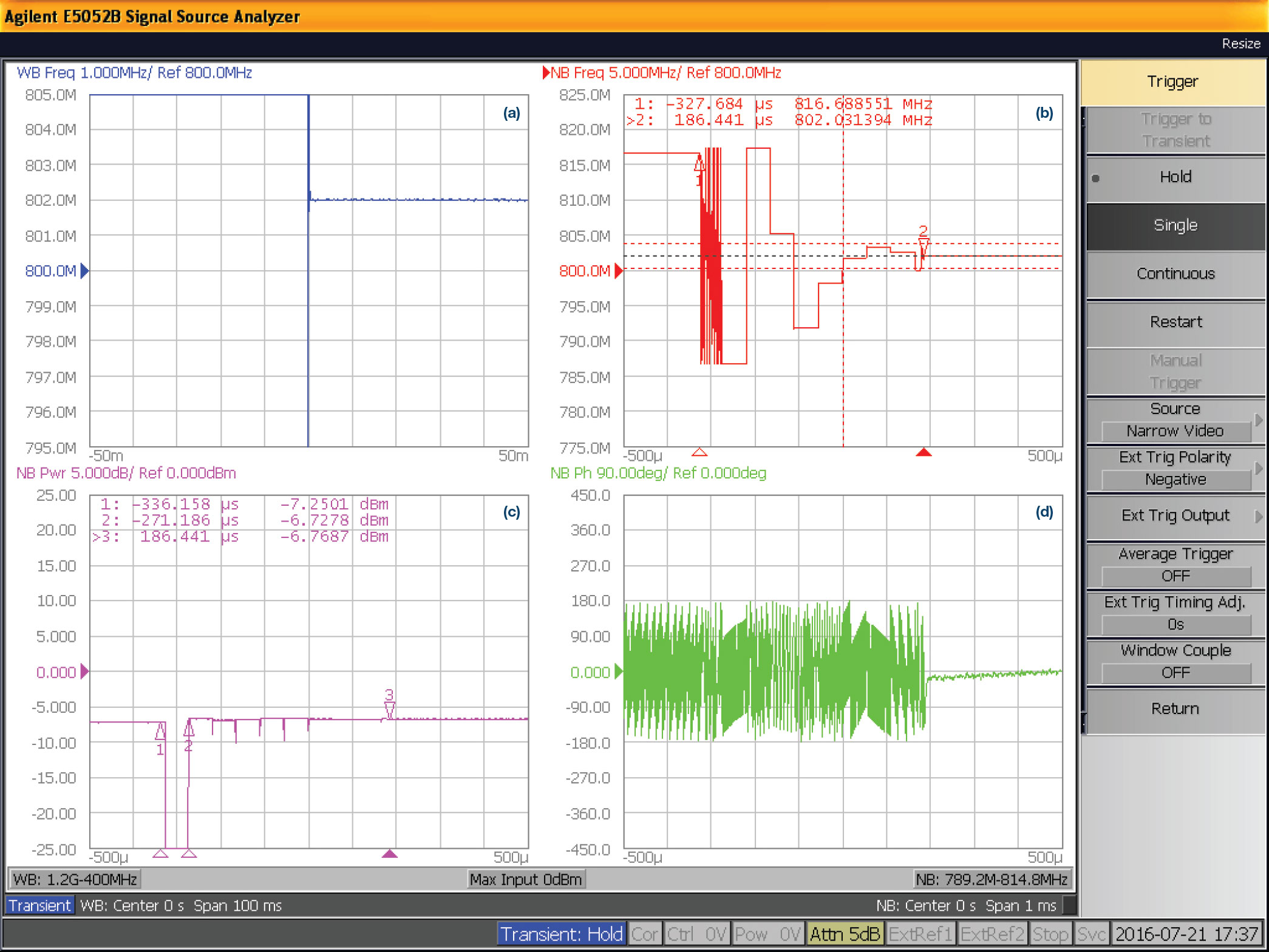
周波数ホッピングには500μsかかる
周波数ホッピングを使用するアプリケーションでは、500μs というのは非常に長い時間です。そこで、AD9361/AD9364には、通常よりも高速な周波数ホッピングを実現するための高速ロック・モードが用意されています。このモードでは、シンセサイザに関する一連のプログラミング情報(プロファイルと呼ばれます)を自身のレジスタまたはベースバンド・プロセッサのメモリ領域に保存することによって高速化が実現されます。図8に示したのは、高速ロック・モードを使用して882MHzから802MHzへの周波数ホッピングを実行した時のテスト結果です。図8 (d) の位相応答を見ると、必要な時間が20 μ s以下に抑えられていることがわかります。なお、位相を表す曲線は、802MHzの位相を基準にしてプロットした結果です。周波数情報とキャリブレーション結果がプロファイルに保存されていることから、SPI(Serial Peripheral Interface)による書き込み時間とVCOのキャリブレーション時間はこのモードでは排除されます。図8(b)はAD9361/AD9364の高速周波数ホッピング機能の様子を表しています。
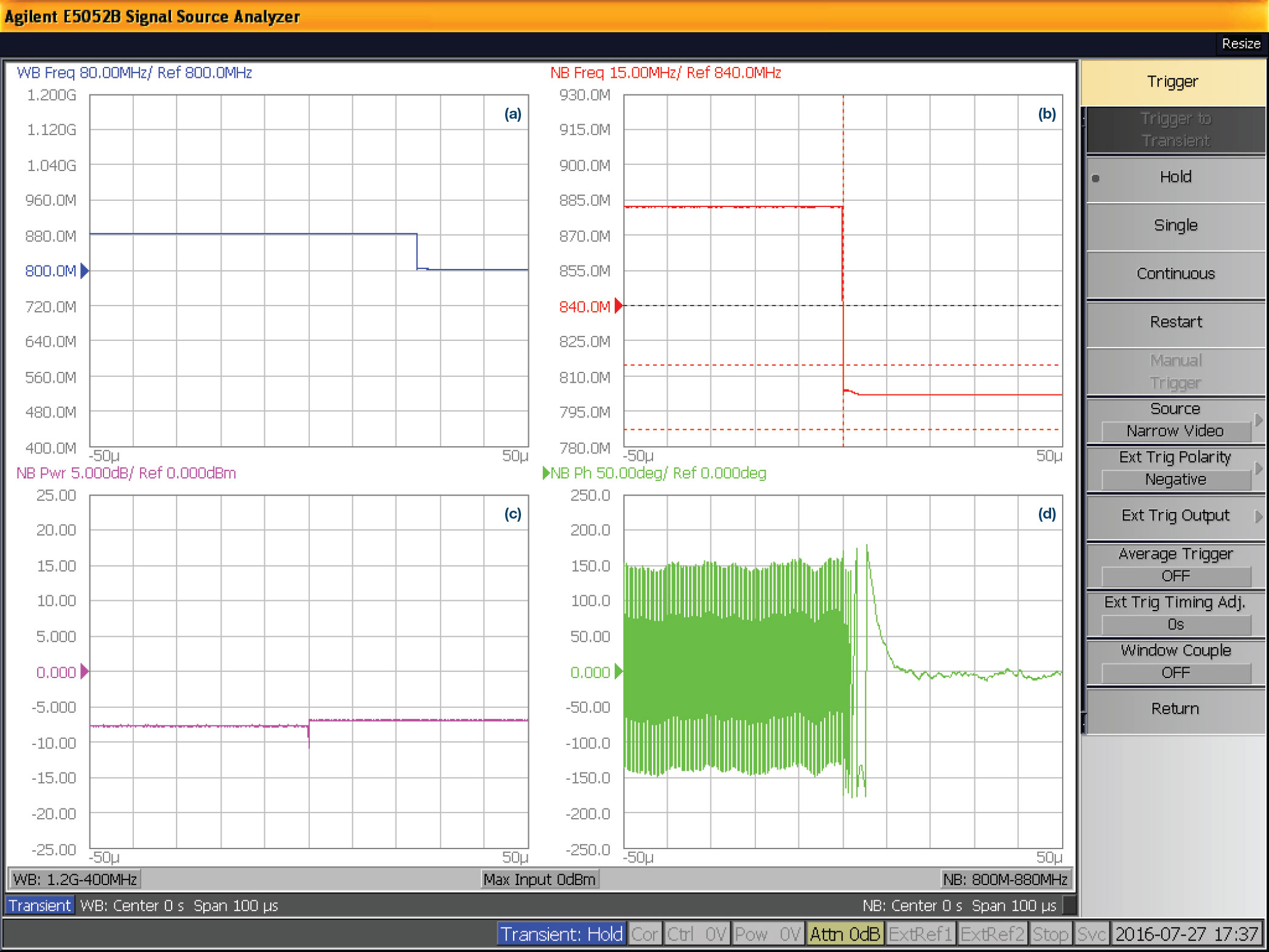
802MHzまでの周波数ホッピングを実行できる
OFDMに対応する物理層
OFDMは変調方式の1つです。この方式では、高いデータレートで変調されたストリームを低速に変調されたサブキャリアに分割します。サブキャリアとしては、近接する狭い帯域が使用されます。このような処理を行うことにより、周波数フェージングに対する感度を下げることができます。この方式の短所は、PAPR(Peak to Average Power Ratio)が高いことと、キャリアのオフセットとドリフトに対して感度が高くなることです。OFDMは広帯域ワイヤレス通信の物理層で広く採用されています。OFDMを実現するための主要な技術としては、IFFT/FFT、周波数同期、サンプリング時間同期、シンボル/フレーム同期などが挙げられます。IFFT/FFTは、FPGAによってできるだけ高速に実行できるようにすべきです。また、サブキャリアの間隔を決めることも非常に重要な要素になります。その間隔は、通信機能を備える移動体が周波数のドップラー・シフトに十分に耐えられるように大きく設定したいところです。しかし、スペクトル効率を高めるために限られた周波数帯域内でより多くのシンボルを送信できるようにするためには、サブキャリアの間隔は小さく設定しなければなりません。エンコーディング技術とOFDM変調を組み合わせていることを指してCOFDM(coded OFDM)という用語が使われることがあります。COFDMは、信号の減衰に対する高い耐性を備えています。また、前方誤り訂正(FEC)を適用することも可能です。そのため、COFDMを利用すれば、移動体からビデオ信号を適切に送信できるようになります。エンコーディングを行うには信号の帯域幅を広くとる必要がありますが、トレードオフを行う価値があると言えます。
集積度の高いアナログ・デバイセズのRFトランシーバICに、The MathWorks社のモデル・ベース設計ツール/自動コード生成ツールと、Xilinx 社の強力な「Zynq-7000 All Programmable SoC」を組み合わせれば、従来に比べ、SDRシステムの設計、検証、テスト、実装を効率的に行えるようになります。その結果、無線システムの高性能化と開発期間の短縮を両立することが可能になります7。
Wi-Fiは最善の解なのか?
Wi-Fiを搭載したドローンは、携帯電話やノート型パソコンといったモバイル機器に対し、無線によって非常に簡単に接続することができます。そのため、Wi-Fi はドローンを非常に使いやすくする技術だと言えるでしょう。しかし、UAVアプリケーションにおけるワイヤレス・ビデオ伝送については、FPGAとAD9361を組み合わせたソリューションを利用する場合の方が、Wi-Fi を使用する場合よりも多くのメリットを得ることができます。まず、物理層については、AD9361/AD9364を採用すれば、迅速な周波数スイッチングと高速周波数ホッピングを利用することで干渉を防止することできます。集積度の高いWi-Fiチップのほとんどは、混雑した2.4GHz帯でも動作します。しかし、それらの製品は、ワイヤレス接続を安定させるために周波数帯を切り替える機能は備えていません。
FPGAとAD9361を組み合わせたソリューションにはもう1つのメリットがあります。それは、設計者が通信プロトコルを柔軟に定義/開発できることです。Wi-Fiの場合、プロトコルは標準規格として定義されています。その中では、全てのデータ・パケットで2ウェイのハンドシェイクを実行しなければならないと定められています。各データ・パケットについては、各パケットに含まれる512バイトの全てを問題なく受信したことを確認する必要があります。もし1バイトでも失われていたら、512バイトの全てを再び送信しなければなりません8。確かに、このようなプロトコルであればデータの信頼性を高めることができます。しかし、ワイヤレスのデータ・リンクを再確立するには複雑な処理を行わなければならず、相応の時間がかかります。例えば、TCP/IPは遅延が大きく、ビデオの伝送や制御をリアルタイムで行うことは困難です。このことが原因で、TCP/IPを利用するUAVは墜落の危険にさらされる可能性があります。それに対し、FPGAとAD9361を組み合わせたSDRソリューションは、1ウェイのデータ・ストリームを採用しています。つまり、空中に浮かんでいるドローンからビデオ信号をテレビ放送のように送信できるということです。実際、リアルタイムのビデオ伝送を目標とするのであれば、パケットを再送する時間は許容できません。
また、Wi-Fiでは、多くのアプリケーションに対して適切なレベルのセキュリティが提供されるわけではありません。それに対し、FPGAとAD9361/AD9364を組み合わせたソリューションでは、暗号化用のアルゴリズムとユーザーが定義可能なプロトコルを利用することにより、セキュリティ面での脅威をかなり抑えることができます。
さらに、1ウェイのデータ・ストリーム配信であれば、Wi-Fi の2 ~ 3倍の通信距離に対応可能です8。SDRが提供する柔軟性によってデジタル変復調の調整を行うことで、距離の要件を満たすことができます。また、複雑な放射環境に応じてS/N比を変更するように調整を行うことも可能です。
まとめ
本稿では、FPGAとAD9361/AD9364を組み合わせたソリューションによって高精細のワイヤレス・ビデオ伝送を実現する場合に重要な意味を持つパラメータについて説明しました。このソリューションを利用すれば、俊敏な周波数スイッチングと高速周波数ホッピングによって安定性と信頼性の高いワイヤレス・リンクを確立できます。また、複雑化が進む伝送路における放射の影響を抑え、墜落の可能性を低減することが可能になります。加えて、このソリューションでは、通信リンクの確立時間を短縮し、遅延を抑えた接続を実現するために、1ウェイの通信プロトコルを使用することができます。これにより、柔軟性が高まります。農業や電力線の検査、サーベイランス(調査監視) といった産業用/民生用アプリケーションで成功を収めるには、安定性と信頼性が高く、セキュアな通信を実現することが不可欠です。
謝辞
1 アナログ・デバイセズが提供するソフトウェア無線ソリューション 、Analog Devices
2 AD9361データシート 、Analog Devices
3 AD9364データシート 、Analog Devices
4 Ken Gentile、アプリケーション・ノート AN-922「Digital Pulse-Shaping Filter Basics(デジタル・パルス整形フィルタの基本)」Analog Devices
5 Scott R. Bullock「Transceiver and System Design for Digital Communications, 4th edition(デジタル通信用のトランシーバとシステムの設計 第4版)」SciTech Publishing,Edison, NJ、2014年
6 E5052B「Signal Sour ce Analyzer, Advanced Phase Noise and Transient Measurement Techniques(シグナル・ソース・アナライザ「E5052B」、位相ノイズと過渡的事象の高度な計測技術)」Agilent、2007年
7 Di Pu/Andrei Cozma/Tom Hill「製造までの4つのステップ:モデル・ベース設計で実現するソフトウェア無線、Part 1:ADI/Xilinx社のSDR向けラピッド・プロトタイピング用プラットフォーム――その機能、メリット、開発ツールについて学ぶ」Analog Dialogue 49-09
8 John Locke 「Comparing the DJI Phantom 4’s Lightbridge vs. Yuneec Typhoon H’s Wi-Fi.(DJI Phantom 4 のLightb r idgeとYuneec Typhoon HのWi-Fiの比較)」 Drone Compares
