産業分野における流量計の用途
「測定できないものは管理できない」――。これは、産業分野、特に流量(フロー)測定についてよく言われることです。産業分野では、より高速に、より高精度に、より多くの流量を絶え間なく監視する必要性が高まっています。住宅廃棄物の監視をはじめとして、産業用の流量測定が重要な意味を持つ場面がいくつも存在するからです。環境保護に対する意識はますます高まっており、クリーンで汚染の少ない世界を築き上げるために廃棄物を適切に処分するとともに、その監視を行うことが必須の作業となっています。現在でも人間は膨大な量の水を消費していますが、人口の増加に伴って今後もより一層多くの水が消費されるようになる可能性があります。流量計の主な用途としては、住宅排水の監視が挙げられますが、下水処理施設内のプロセス制御システムにおいても、流量計は不可欠な要素となっています。

流量計は、化学/製薬、食品/飲料、パルプ/製紙など、産業分野の多くの制御プロセスでも利用されています。これらの用途では、固形物がかなり混在した状態で流量を測定しなければならないことが少なくありません。そうした状況に、一般的な流量測定技術で対応するのは困難です。
受け渡しと支払いを伴う取引にも計量器が使われることがあります。そのような例として、大きなパイプラインを介して行う石油の輸送が挙げられます。この用途では、流量測定の精度が時間の経過に伴って少し変化しただけで、取引を行う両者の収益が大きく増減する可能性があります。
電磁誘導が液体の流量測定に適している理由
液体の流量測定に電磁誘導を利用すると、多くのメリットを得られます。通常、センサーは管内に一列に挿入されるため、測定の対象となる媒体の流れを妨げたり制限したりすることはありません。また、センサーを液体に直接浸すわけではなく、可動部品も存在しないので、摩耗や損傷の恐れもありません。
電磁誘導を利用した流量測定では、体積流量の測定を行いますが、その場合は、流体の密度、温度、圧力、粘度などに変化があっても影響を受けません。水を使って一度キャリブレーションを実施した電磁式の流量計は、追加の補正を行うことなく、導電性を持つ水以外の流体の測定に使用できます。これは、他の方式の流量計にはない大きな長所です。
電磁誘導技術は、固体と液体の2相から成る媒体内の測定に特に適しています。例えば、スラリーなど、液体中に泥や固形微粒子、繊維、粘性物質などが浮遊している高導電性の媒体の測定で威力を発揮します。また、電磁誘導技術は、媒体が汚水、泥、鉱石パルプ、製紙用パルプ、化学繊維スラリーなどである場合の測定にも使用できます。食品業界や製薬業界では特に有用で、コーン・シロップ、果汁、ワイン、薬品、血漿など、多くの特殊な媒体に対応することが可能です。
電磁式流量計の仕組み
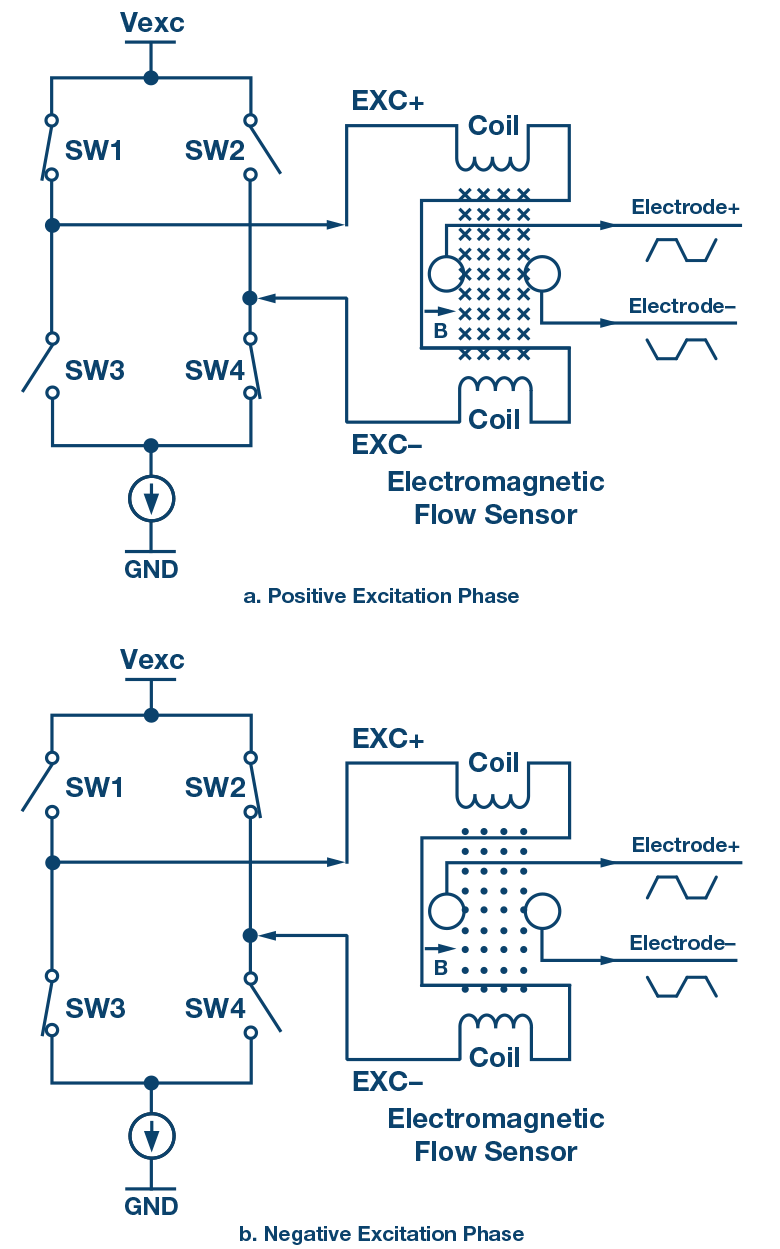
電磁式の流量計は、ファラデーの電磁誘導の法則に基づいて動作します。ファラデーの法則によると、センサーの磁界を導電性の流体が流れる際には、2つの電極の間に体積流量に比例する起電力が生成されます。起電力は流れの向きと磁界に対して垂直になります。その大きさは次の式で表されます。

ここで、Eは誘導起電力(電位差)、kは定数、Bは磁束密度、Dは測定の対象となる管の内径、vはその管の内部で電極断面の軸方向に流れる流体の平均速度です。

センサーの出力範囲
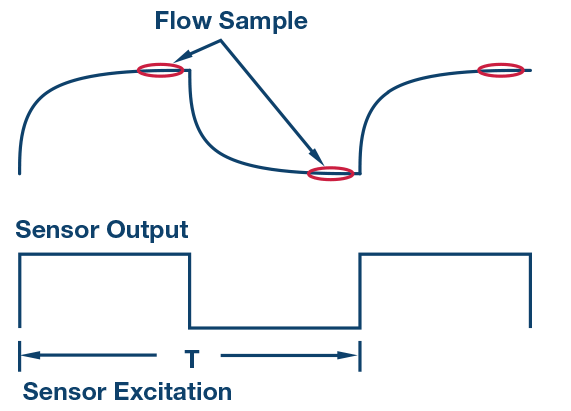
電磁式の流量センサーは差動出力を備えています。その感度は、一般に150μV/m/s~200μV/m/sです。励起電流の向きは交互に変化し、センサーの出力信号の振幅は倍になります。流量の測定範囲が0.5m/s~15m/sの場合、センサーの出力信号の振幅は75μVから4mV~6mV程度になります。図3は、センサーを定電流源で励起して流体を流した場合に、センサーからの出力信号がどのようになるのかを示したものです。センサーの出力をオシロスコープで観測した結果(図3の右)を見ると、大きなコモン・モード電圧に、非常に小さい信号が重畳されていることがわかります。紫色が正の電極、赤色が負の電極の信号です。桃色は、正の電極の値から負の電極の値を引いた結果です。この小振幅の信号が、大きなコモン・モード電圧に重畳されていたということです。

センサーによる従来の測定方法
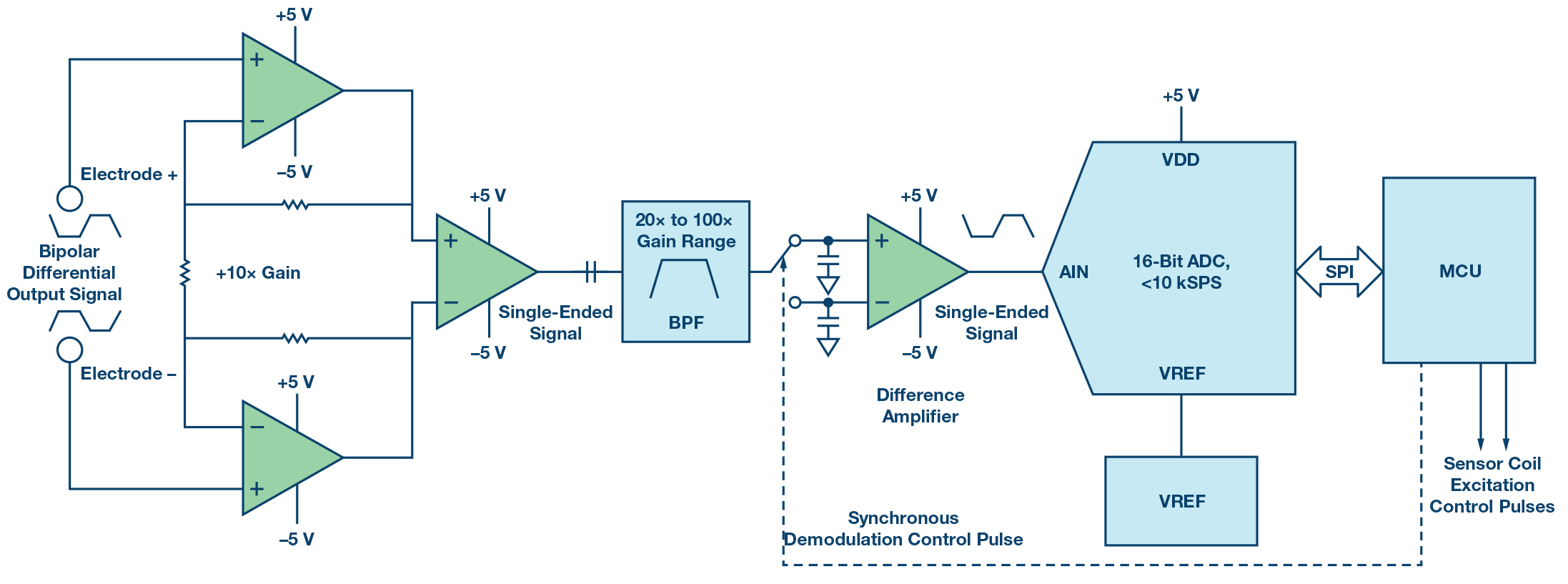
流量センサーを使用した従来の測定方法は、非常にアナログ的なものでした。複数段から成る回路の初段には、センサーのリーク電流の影響を抑えるための高い入力インピーダンスと、高い入力同相ノイズ除去性能を備えるプリアンプ段を配置します。これに続いて、3次/4次のアナログ・バンドパス・フィルタ、サンプル&ホールド回路があります。そして最後にA/Dコンバータ(ADC)が配置されます。図4に示したのが、標準的なアナログ・フロントエンド回路です。センサーの出力信号は、まず計装アンプによって増幅されます。ここでは、出力信号を可能な限り増幅しつつ、不要なDCコモン・モード電圧によってアンプの出力が飽和しないようにする必要があります。通常、計装アンプのゲインは最大10倍程度にします。バンドパス・フィルタでは、DC成分の影響をさらに除去しつつ、信号を再度増幅してサンプル&ホールド回路に引き渡します。最終的に、流量に対応するこの差動信号はADCに送られます。
アーキテクチャの変化を促す市場トレンド
現在では、図4とは異なる新たなアーキテクチャが求められるようになってきました。その背景には、いくつかの市場トレンドがあります。1つは、より多くのデータを扱いたいというニーズです。現在では、流量以外の液体の属性を監視することも重要視されています。それにより、液体に混入している不純物の種類を特定したり、液体の密度/粘度が用途に対して適切か否かを判定したりといったことが行われています。そのような診断機能を追加することでより多くのメリットが得られるため、この種の要求は後を絶ちません。しかし、従来のアナログ方式では、そのような情報を容易に抽出することはできませんでした。なぜなら、同期復調時にセンサーからの情報の多くが失われてしまうからです。
また、製造工程の生産性と効率を高めたいという要求もとどまることがありません。例えば、液体の注入/充填を行うアプリケーションでは、製造プロセスの規模の拡大に伴ってより多くの充填用ノードが追加されることになります。それによって充填速度が向上するため、流量の監視もより迅速かつ正確に行えるようにする必要があります。

従来の製造プロセスでは、機械的な技術や重量に基づく技術によって、液体の正確な注入量/充填量を判断していました。この方法はコストが高く、規模の拡大に対応しにくいという欠点があります。この問題に対処するために、液体を扱う場合には、流量計、特に電磁式の流量計が使用されるようになりました。
新たなアーキテクチャ
アナログ・フロントエンド回路の設計は、オーバーサンプリング方式を導入することによって大幅に簡素化されます。アナログのバンドパス・フィルタとサンプル&ホールド回路は不要になり、回路内のフロントエンド・アンプは計装アンプだけになります。図6の回路では、計装アンプとしてアナログ・デバイセズの「AD8220」を使用しています。これはJFET入力でレールtoレール出力の計装アンプであり、Σ Δ変調方式の高速ADCに直接接続することができます。
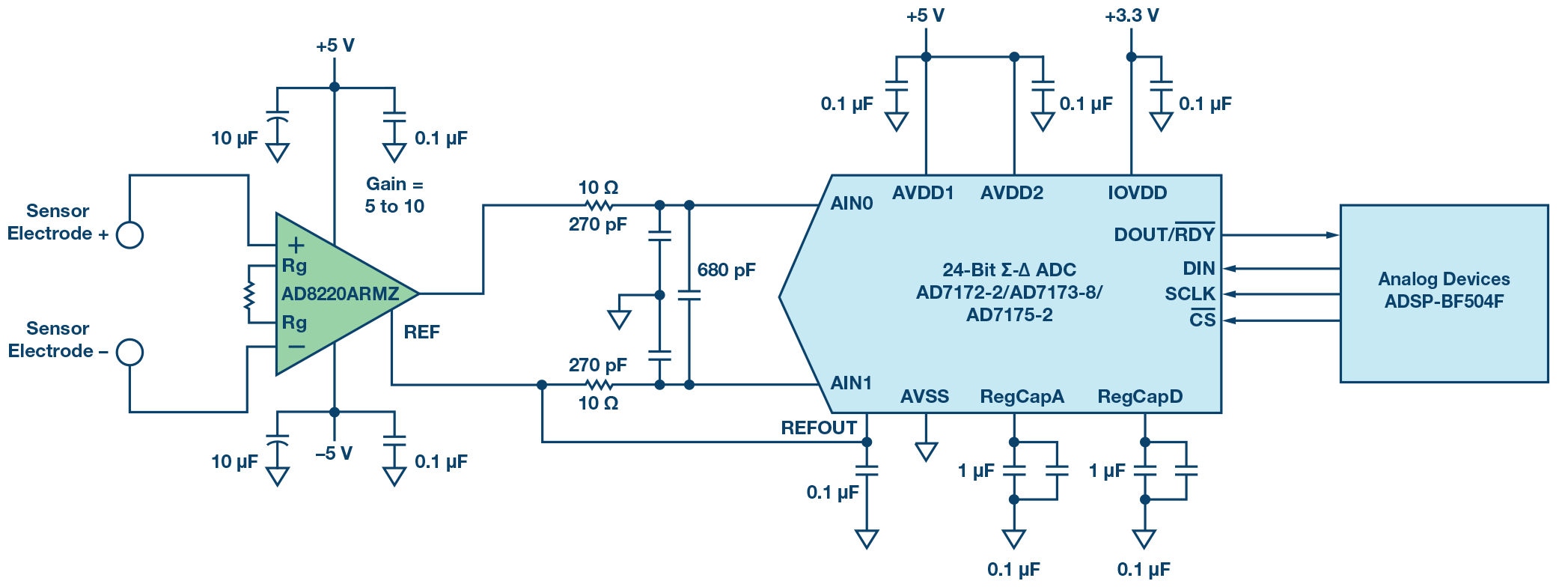
AD8220とAD717x-xでアナログ・フロントエンドを構成している
アナログ・フロントエンドの要件、設計に与える影響
アンプとADCは、この回路における最も重要なブロックです。最初に配置するアンプには、いくつかの重要な要件があります。
1つはCMRRです。電解質溶液内では、イオンが一定の方向に移動し、電極と流体の間に電位差が生じます。この現象を分極と呼びます。仮に、両方の電極が正確に整合しているとすると、電極の電位は互いに等しくなるはずです。金属の分極電圧はその種類ごとに異なり、数百m V ~ ± 2 V程度です。これが、センサーの出力( プリアンプの入力) に現れるDCコモン・モード電圧となります。このコモン・モード電圧をプリアンプによって除去します。
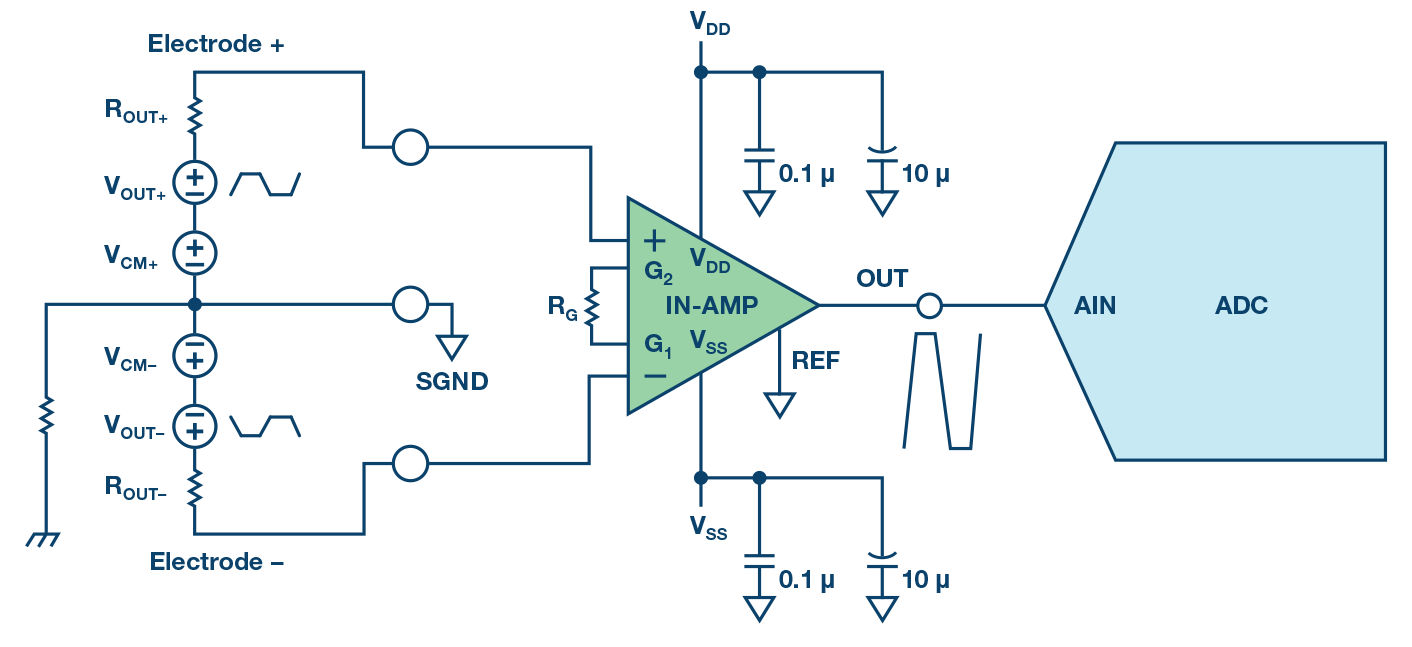
CMRRが100dBであれば、0.3VDCのDCコモン・モード電圧は3 μ Vに減衰されます。これは、アンプの出力におけるDCオフセットとして現れ、キャリブレーションによって後で除去することができます。センサーにおける同相電圧は一定であることが理想です。しかし、実際には時間の経過に伴って変動しますし、液体の質や温度などの影響も受けます。CMRRが高いほど、バックグラウンドにおける継続的なキャリブレーションの必要性は低下し、フローの安定性は高まります。
表1. CMRRが流量の測定値に与える影響
| CMRRとDCコモン・モード電圧/ノイズの関係 | ||||
| CMRR | 120 dB | 100 dB | 80 dB | 60 dB |
| 0.28VDCのコモン・モード電圧 | 0.28 μV | 2.8 μV | 28 μV | 280 μV |
| 0.1V の同相ノイズ | 0.1 μV | 1 μV | 10 μV | 100 μV |
| 同相ノイズを175μV/m/sの流量センサーの測定値に換算 | 0.0006 mps | 0.006 mps | 0.06 mps | 0.6 mps |
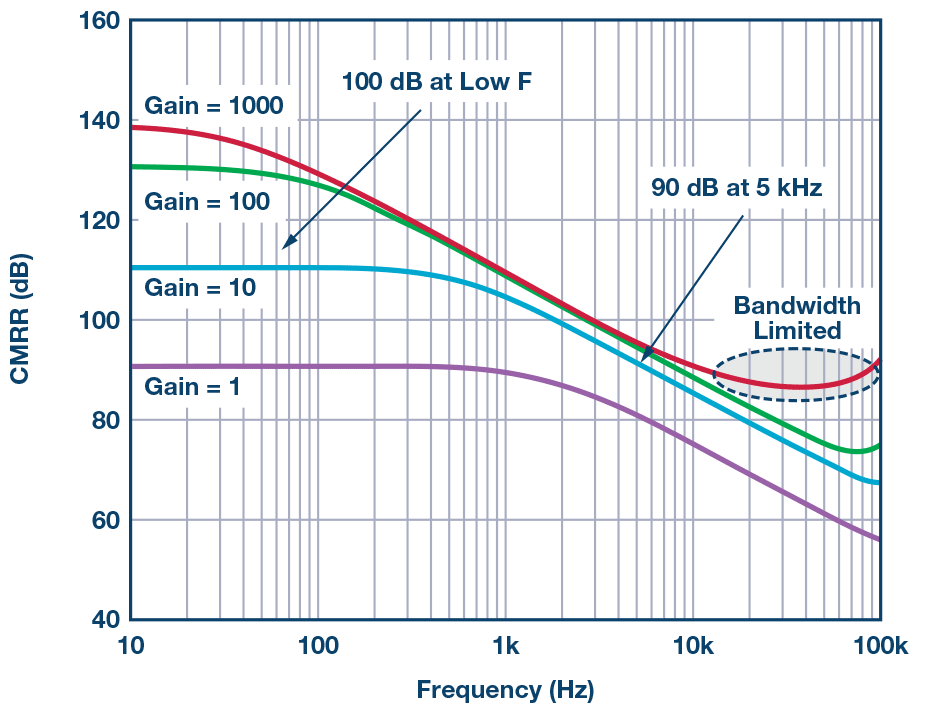
電極の金属材料が電解質溶液に接触すると、電解質溶液と電極の間の作用によって高い周波数領域にACコモン・モード電圧が生じます。一般にその振幅は大きくありませんが、完全にランダムなノイズとして現れるため、容易に除去することはできません。したがって、DC領域だけでなく高い周波数領域においても優れたCMRRが得られるプリアンプが必要になります。AD8220であれば、DC~ 5kHzの範囲で優れたCMRR性能を発揮します。AD8220のBグレード品の場合、最小CMRRはDC~60Hzで100dB、5kHzまでで90dBです。これであれば、μVレベルのコモン・モード電圧とノイズを除去することができます。CMRRが120dBの場合、0.1Vp-pのノイズは0 . 1 μ Vp-pまで低減されます。表1は、CMRRが低い場合にセンサーの出力信号に現れる影響についてまとめたものです。
プリアンプでは、リーク電流が少なく、入力インピーダンスが高いことも重要な要件となります。電磁式流量センサーの出力インピーダンスは、GΩのレベルにまで及ぶケースがあります。アンプの入力インピーダンスが高ければ、センサーの出力に過度な負荷をかけて信号の振幅を低下させてしまうのを避けることができます。また、アンプのリーク電流は、センサーに流れ込んで大きな誤差を引き起こしてしまう可能性があります。したがって、リーク電流の値は十分に低く抑えなければなりません。AD8220の場合、入力バイアス電流は最大で10pA、入力インピーダンスは1013Ωです。これであれば、電磁式流量センサーの広範に及ぶ出力に対応できます。表2は、出力インピーダンスが10GΩのセンサーに対し、プリアンプの入力インピーダンスが与える影響についてまとめたものです。
表2. アンプの入力インピーダンスが流量の測定値に与える影響
| センサーの出力 インピーダンス (GΩ) |
アンプの入力 インピーダンス (GΩ) |
1m/sに対する 減衰信号の振幅(µV) |
再現性(%) | 読み取り誤差(%) |
| 10 | 10 | 87.50 | 0.065% | 0.196% |
| 10 | 100 | 15.91 | 0.051% | 0.154% |
| 10 | 1000 | 1.73 | 0.049% | 0.148% |
| 10 | 10,000 | 0.17 | 0.049% | 0.147% |
アンプには、もう1つ重要な特性があります。それは、0.1Hz~10Hzにおける1/fノイズです。この特性により、アプリケーションにおけるノイズフロアが決まります。ゲインを10に設定した場合、 AD8220の入力換算電圧ノイズは約0.94μVp-pです。これにより、瞬時流量で6mm/s、積算流量でmm/s未満という特性が決まります。
ADCの選定方法、アプリケーションにおける重要な要件
オーバーサンプリング方式を採用すると、実装の難易度が高まり、ADCブロックに求められる性能も高くなります。2次的なアナログ・フィルタ/ゲイン回路は存在せず、ADCの入力範囲のほんの一部のみが使用されることになります。オーバーサンプリングや平均化だけで、性能が大幅に向上することはありません。正確な流量計算を行うには、センサーの各サイクルにおいて完全なセトリングを実現する必要があります。また、ファームウェアのプロセスの一部として、不要なグリッチを除去するために、限られたデータ・ポイントからA/D変換によって十分な数のサンプルを取得する必要があります。
一般に、オーバーサンプリングを利用するアーキテクチャには、データレートが20kSPS(キロサンプル/秒)を超えるADCが必要です。データレートは高ければ高いほど有利になりますが、この点は流量測定の本質とは特に関係はありません。アナログのバンドパス・フィルタ段が存在しないので、センサーの出力はそのままADCに入力されます。この場合、センサーの出力信号の立ち上がりエッジはフィルタリングされません。したがって、ADCは、信号の立上がり/立下がりエッジを十分な精度で取得できるだけの分解能を備えている必要があります。
流量計の精度は、瞬時流量または積算流量の測定精度によって表すことができます。流量計の規格では、30s、60sといった時間にわたって水の平均流量を測定する積算流量が用いられます。瞬時流量ではなく積算流量を用いることで、±0.2%といったシステムの精度を定めることができます。一方、瞬時流量はリアルタイムの流量が重要である場合に使用されます。その測定には、格段に高精度な電子回路が必要になります。理論上、5mm/sの瞬時流量を測定するには、1つの励起周期に対して、ADCの分解能が20.7ビット(ピークtoピーク)、その後段のFIR(有限インパルス応答)フィルタには約600個のサンプルが必要です。これらは現実のアナログ・フロントエンドによって達成可能な数字です。
表3. アナログ・フロントエンドとADCにおけるノイズの許容値
| 感度が175μV/m/sのセンサーの流量分解能 | その分解能におけるセンサーの出力信号振幅 | アナログ・フロントエンドの入力換算ノイズの許容値 | ゲインが10のオーバーサンプリング型アナログ・フロントエンドにおけるADCのノイズの許容値 |
| 10 mm/s | 3.5 μV p-p | 1.75 μV p-p | 5.8 μV p-p/19.7 ビット* |
| 5.4 mm/s | 1.89 μV p-p | 0.95 μV p-p | 3.2 μV p-p/20.6 ビット* |
| 5 mm/s | 1.75 μV p-p | 0.88 μV p-p | 2.9 μV p-p /20.7 ビット* |
| *FIRフィルタの1サイクルと1回の瞬時流量計算によるデータ | |||
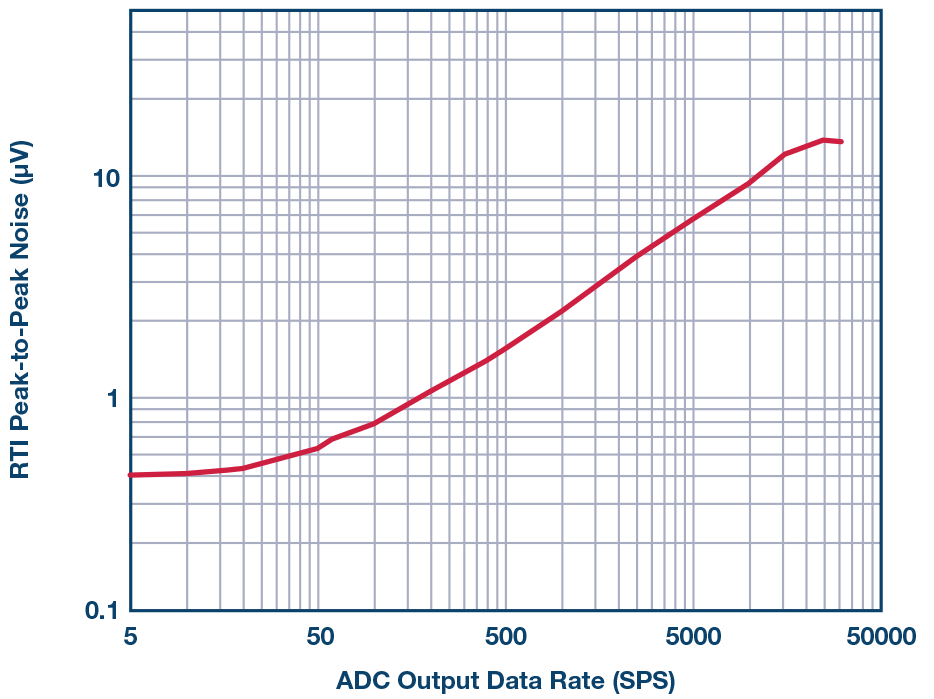
「AD7172-2」は、入力ノイズが小さく高速にサンプリングが行えるΣΔ型のADCです。この製品は、電磁式流量計に最適な性質を備えています。2.5Vの外部リファレンスを使用する場合、ノイズを0 . 4 7 μ V p - p(標準値)まで抑えることが可能です。それにより、増幅段を追加することなく、最終的な流量測定の結果を最大50SPSで取得することができます。図10に、AD7172-2を用いたオーバーサンプリング型フロントエンド回路のノイズ特性を示しました。
応答時間の短縮による効率の向上
センサーの励起周波数を上げれば、流量測定システムの更新レートを高めることができます。その場合、センサーの出力のセトリング時間は短くなるため、平均化に使用可能なサンプル数は少なくなります。ADCのノイズが小さければ、センサーの出力換算ノイズをさらに抑えることができます。AD8220のゲインを10に設定し、高い更新レートにおけるアナログ・フロントエンドの性能を評価しました。表4と図11を見れば、ADI製品の性能は、システムの更新レートが高い場合に、最も近い競合製品の性能を大きく上回ることがわかります。
表4. 励起周波数とセンサーの測定精度の関係(競合品との比較)
| 励起周波数(Hz) | 6.25 | 12.5 | 25 | 50 | 100 | 200 | 400 |
| AD7172-2 | 0.12% | 0.12% | 0.13% | 0.16% | 0.19% | 0.24% | 0.33% |
| AD7172-2に最も近い競合製品 | 0.13% | 0.15% | 0.19% | 0.25% | 0.33% | 0.46% | 0.64% |
| 差 | 12% | 22% | 47% | 57% | 77% | 89% | 95% |

( 競合品との比較)
入力アンプによるADCの直接駆動
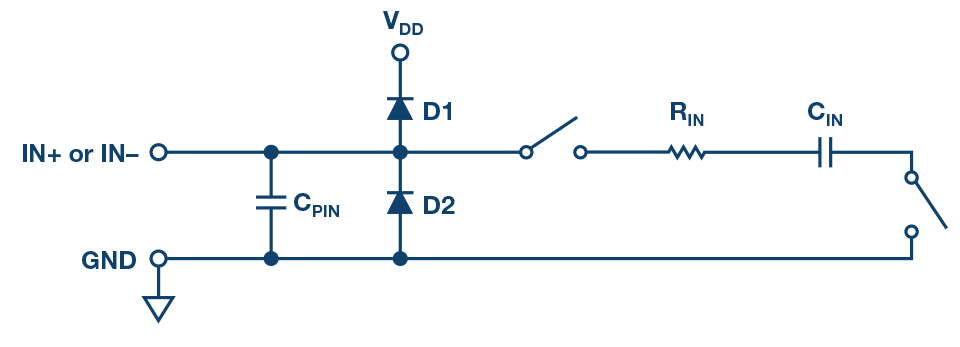
一般に、入力アンプによってADCを直接駆動できるかどうかは、入力アンプの駆動性能とADCの入力構造に依存します。新たな高精度ADCの多くは、スイッチド・キャパシタをベースとするアーキテクチャを採用しており、オンチップのトラック&ホールド回路は、前段のアンプに対する過渡的な負荷となります。正確なサンプリングを行うには、アンプによってスイッチド・キャパシタの入力をセトリングする必要があります。
アンプがADCを駆動できるかどうかは、以下の式によって確認できます。

各変数の意味は以下のとおりです。
BW :ADCを駆動するためにアンプに求められる最小帯域幅
MCLK :ADCの変調器のクロック周波数(単位はHz)
T :ショート時間(単位はs)
FS :ADCのアナログ入力フルスケール(単位はV)
CMV :ADCの入力範囲のコモン・モード電圧(単位はV)
Error :ADCのサンプリングにおけるセトリング誤差
例えばAD7172-2の場合、変調器の周波数は2MHz、ショート時間は10ns、入力フルスケールは5 V 、C M V は2.5V、セトリング誤差は1ppmです。これをバッファなしのモードで使用する場合、上に示した式から、ドライバ・アンプに必要な帯域幅BWは8.7MHzとなります。AD8220をはじめとする多くの高精度計装アンプは利得帯域幅積が1.7MHzなので、8.7MHzの帯域幅はそれを上回っています。AD7172-2は、両アナログ入力部にレールtoレールで高精度のユニティ・ゲイン・バッファを備えています。これは、すべての周波数にわたってAD7172の入力段を駆動できるようにするためです。このような仕様であることから、回路設計における複雑さとリスクが緩和されます。内蔵バッファの入力インピーダンスは非常に高く、標準的な入力電流はわずか5nAです。そのため、高インピーダンスのソースをアナログ入力部に直接接続することができます。このように、スイッチド・キャパシタを使用したADCのサンプリング回路をバッファによって駆動できることから、アナログ・フロントエンド回路の要件は緩和されます。また、バッファ当たりの標準的な消費電流は0.87mAなので非常に効率的です。各バッファ・アンプは完全にチョッピングされるため、オフセット誤差のドリフトと1/fノイズは最小限に抑えられます。
磁界生成の仕組み
測定の対象となる管の内部には、磁界が生成されます。これは、管の外側のすぐ横に配置されたコイルに定電流を流すことによって実現します。コイルは対になっていることが多く、直列に接続されています。一般に、コイルには巻き数が数百の銅線が使用されますが、これはドライバ回路に対する大きな誘導性の負荷になります。通常、コイルのインダクタンスは数百mHで、それに50~100ΩのDC直列抵抗が加わります。ドライバ回路では励起電流の向きが変化しますが、それに伴って磁界の向きも各サイクル内で交互に変化します。ドライバ回路の励起電流の向きは、Hブリッジにおいて、2対のスイッチをオン/オフすることによって切り替えます。切り替えを行う周波数は、ノイズを除去するために電源の周波数の整数倍にするのが一般的です。ドライバ回路は、定電流源と、マイクロプロセッサによって制御されるHブリッジで構成されます。
消費電力の重要性
消費電力は電磁式の流量測定においても重要な要素です。励起には、管の直径が小さい場合で最大50mA、大きい場合は最大500mAないしは1Aと、かなり多くの電流を要することがあります。線形制御によって定電流回路を実現する場合には、消費電力と基板上の実装面積がかなり大きくなる可能性があります。
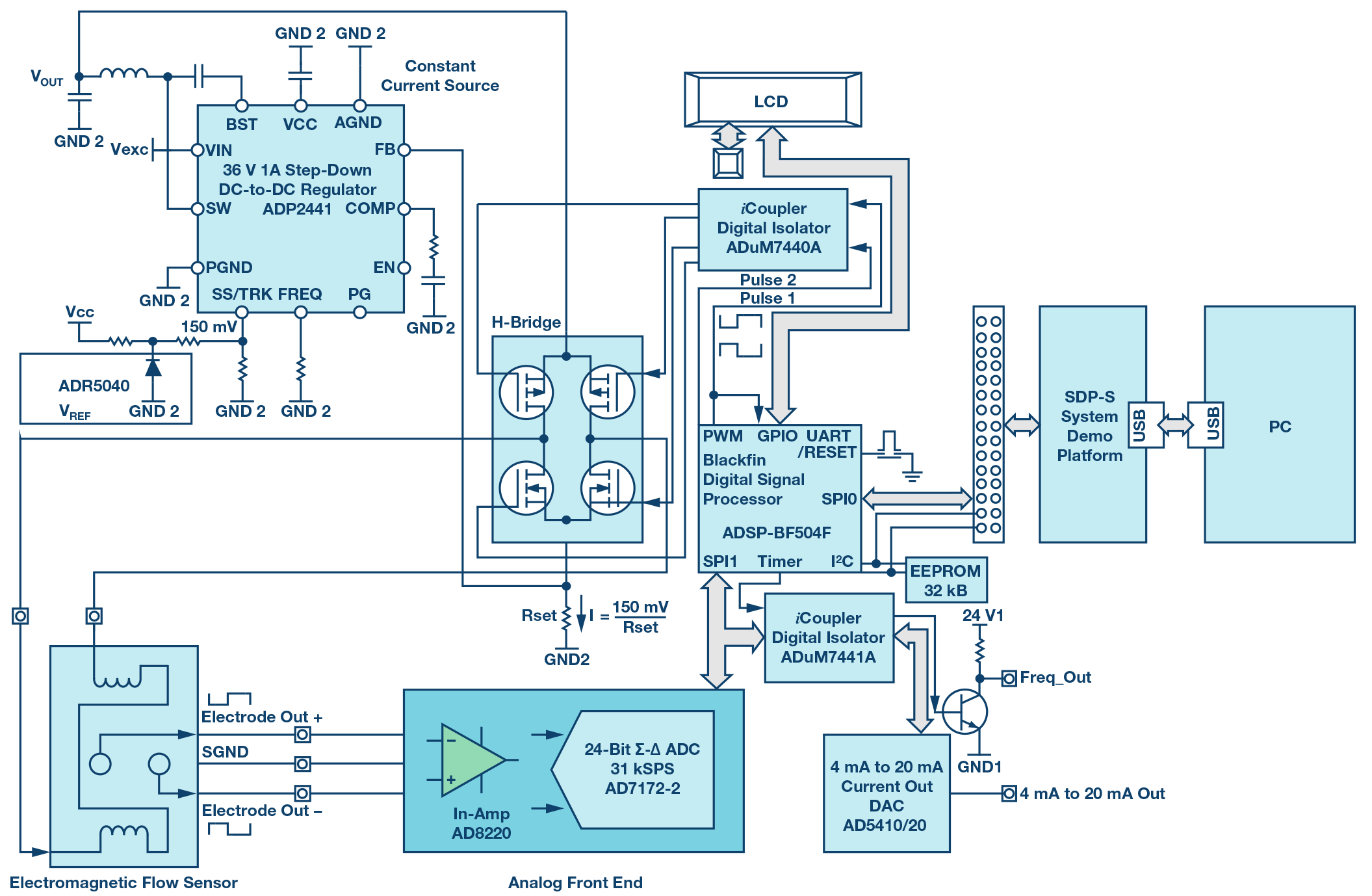
線形制御による定電流回路ではなく、スイッチング・レギュレータを使用すれば消費電力を抑えることができます。図14に示したスイッチング・レギュレータ「ADP2441」は、定電流源出力モードに設定してあります。電圧リファレンス「ADR5040」の1.2Vの出力電圧は、2つの抵抗によって150mVに分割されています。この150mVの電圧をADP2441の電圧トラック・ピンに印加することで、電圧フィードバック・ピンも150mVに保たれます。ADP2441の出力電流ISETは、フィードバック・ピンに抵抗(0.6Ωなど)を接続することで調整できます。


絶縁されたHブリッジを駆動する。
(b) では、線形制御方式の定電流源とフォトカプラによって、絶縁されたHブリッジを駆動する
表5. 推奨されるスイッチング・レギュレータ
| 推奨されるADIのスイッチング・レギュレータ | 効率 |
| ADP2441 | 200mA(@12V)出力時で90%。 最大1A出力 |
| ADP2360 | 10mA出力時で90%、最大50mA出力 |
ドライバによって得られるメリット
図14に示した電磁式流量センサー用のドライバ回路(励起回路)には、基板上の実装面積を大幅に削減できるというメリットがあります。通常、ドライバ回路とシグナル・コンディショニング回路の間は絶縁されます(一般に、1 k Vの基本絶縁で十分です)。従来、電磁式の流量計測に使用するトランスミッタには、フォトカプラによる絶縁が使用されてきました。しかし、フォトカプラは信頼性が低く、サイズがかなり大きいという問題を抱えています。この問題は、絶縁手段としてデジタル・アイソレータを採用することで回避できます。例えば、高速CMOSとモノリシックの空芯変圧器技術を組み合わせて実現されたデジタル・アイソレータに「ADuM7440」があります。この製品は、16リードの小型QSOPによって4つの独立した絶縁チャンネルを提供します。

従来のドライバは、フォトカプラ、線形制御方式の定電流源、スルーホール・パッケージにディスクリートのFETを収容したHブリッジで構成されていました。それと比較すると、デジタル・アイソレータを採用した省電力の絶縁方式では、実装面積を80%以上削減することができます。
表6. Hブリッジ用のドライバで使われる主要コンポーネントの比較
| コンポーネント | 数量 | パッケージ | 占有面積(mm2) | コンポーネント | 数量 | パッケージ | 占有面積 (mm2) | |
| PC817B | 2 | DIP-4 | 63.24 | ADUM7440ARQZ | 1 | QSOP-16 | 31 | |
| TIP127(PNP型のダーリントン・トランジスタ) | 2 | TO-220 | 51.54 | ZXMHC6A07N8 | 1 | SOIC-8 | 31 | |
| TIP22(NPN型のダーリントン・トランジスタ) | 2 | TO-220 | 51.54 | MMBT3904LT1G | 2 | SOT-23 | 13.92 | |
| 1SMA5917BT3G | 1 | SMA | 13.55 | |||||
| 占有面積の合計 | 333 | 占有面積の合計 | 89 |
流量の計算方法
流量に対応するAC信号に対しては、デジタル領域でフィルタリングと同期復調を施します。図16は、デジタル領域で行う同期復調のアルゴリズムの動作を示したものです。DSPによって送信される制御信号1と同2は、電磁式流量センサーのコイルを励起するための相補的な論理信号です。これら2つの信号によって制御を行うことで、電磁式流量センサーのコイルを流れる電流の向きが各サイクル内で反転します。それによって磁界の向きも反転し、電極からの出力、つまりはセンサーの出力も各サイクル内で反転します。

DSP(この例では「ADSP-BF504F」)は、n番目のサイクルにおいて、ADCからのサンプルが入力される際の制御信号1、同2のタイミングと論理値を把握しています。そこで、DSPは制御信号の論理状態に基づいて、ADCからのサンプルをSRAM内の2つの配列に振り分けます。これらタイムスタンプ付きのサンプルのうち、正の半サイクルに取得されたものが1つのグループに、負の半サイクルに取得されたものがもう1つのグループに分類されるということです。続いて、それぞれの集合はFIRフィルタ(ローパス・フィルタ)を通過します。このフィルタのカットオフ周波数は30Hzに設定されており、有効な信号を通過させつつ、電源の周波数と高周波のノイズ成分からの干渉を除去します。図17に、オーバーサンプリング型フロントエンド回路におけるFIRフィルタの特性と、アナログの同期復調アーキテクチャで使用されるバンドパス・フィルタの特性を示しました。
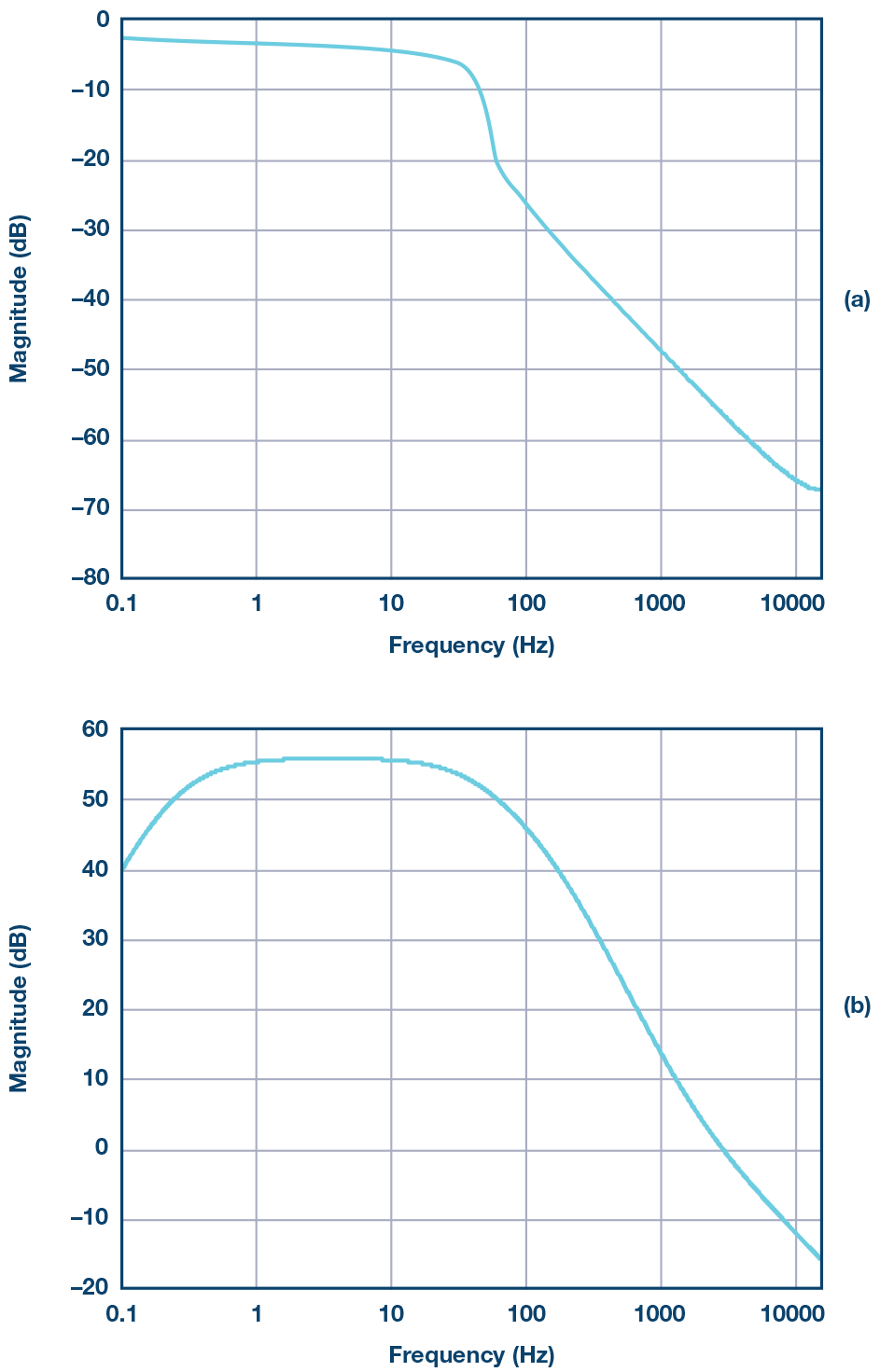
(b) はアナログ・バンドパス・フィルタの特性
続いて、このアルゴリズムでは2 つの平均値の差を求め、流量に比例する値を取得します。得られた値の単位は、LSB/m/sとなります。この値にさらに処理を施し、次の式によって最終的な流量を求めます。

各変数、定数の意味は以下のとおりです。
ΔFlowRate : 励起の正位相と負位相に対応する2つの平均値の差(単位はLSB)
VREF : ADCのリファレンス電圧(単位はV)
N : ADCの分解能
G : アナログ・フロントエンドのゲイン
Sensitivity : センサーの公称感度(単位はV/m/s)
KT : トランスミッタの係数
KS : センサーの係数
KZ : ゼロ・オフセット
プロセッサの選定方法
プロセッサの選択は重要です。より複雑なアルゴリズムを実行したり、高度な診断/予測を行ったりするために、ますます高い処理能力が求められるようになるからです。その一方で、電力インフラや産業用インフラの全体にわたってエネルギー効率を向上させようという世界的な動きもあります。顧客は、より高い処理能力を、より少ない消費電力、より手頃な価格で得たいと考えています。
電磁式の流量計で使用するデジタル・フィルタは、かなりの処理能力を必要とする可能性があります。例えば、語長が32ビットのFIRフィルタの場合、80MIPSの処理能力を必要とします。流量の計算、周辺の通信ドライバ、データの通信には、それぞれ40MIPS、32MIPS、20MIPSが必要になります。以上を合計すると172MIPSになります。本稿で取り上げている設計例の場合、400MIPSの最大処理能力を備えるADSP-BF504Fによってこれらのタスクを実行します。ただ、それによって、同ICの処理能力の50%近くが消費されることになります。しかし、実際には、マルチレイヤの通信スタック、HART(Highway Addressable Remote Transducer)通信、診断、安全性の監視機能、LCMドライバなどの処理も実行する必要があります。
表7. 処理能力の消費量
| タスク | MIPS |
| FIRフィルタ | 80 |
| 測定したデータの処理 | 40 |
| AD7172-2からのデータへのアクセス | 32 |
| その他 | 20 |
| 合計 | 172 |
オンチップの周辺回路も重要です。DSPには、SPI( Serial Peripheral Interface) 、UART ( Universal Asynchronous Receiver Transmitter)、I2C、パルス出力通信など、さまざまな機能が実装されます。ハードウェアの制御には35本のGPIOを使用でき、LCD、キーパッド入力、アラーム、診断などの機能の制御、論理信号の入出力などを行います。また、SRAMには、フィルタの係数、SPI通信のデータ、LCMのデータ・キャッシュ、マシン・ステートのデータ、内部ステータスのフラグが格納されます。68kBのオンチップSRAMは、32kBのL1命令SRAM/キャッシュと32kBのL1データSRAM/キャッシュで構成されており、システム・レベルの要件を満たします。メモリは、RS-485やHARTに対応する通信にも必要です。ADSP-BF504Fが備える4MBのフラッシュ・メモリは、プログラム用のデータ、フィルタの係数、キャリブレーション用のパラメータの格納に使用できます。

プロセッサには、今後、より高い処理能力が求められるようになると予想されます。そうしたニーズに対応可能な製品としては、Blackfin®シリーズの「ADSP-BF70x」があります。ADSP-BF70xは高性能のDSPで、800MMACS(メガ積和演算/秒)という業界最高水準の処理能力を100mW未満の消費電力で実現します。コスト効率の高いADSP-BF70xの8製品は、最大1MBのL2 SRAMを内蔵しているため、多くのアプリケーションにおいて外部メモリが不要になります。また、オプションのメモリ・インタフェースとしてDDR2/LPDDRに対応するバージョンも用意されています。表8に、ADSP-BF70xの主要な特徴についてまとめました。
表8. BlackfinシリーズのADSP-BF70xファミリー
| 品番 | DSPコアの性能 | オンチップ・メモリ | 外部メモリ | 主要な接続オプション | そのほかの特徴 | パッケージ |
| ADSP-BF700 ADSP-BF702 ADSP-BF704 ADSP-BF706 |
100 MHz ~ 400 MHz 800MMCAC (16ビット) 400MMCAC (32ビット) |
132kBのL1 SRAM/キャッ シュ L2 SRAM(128k- B、256kB、 512kB、1MB) 512kB L2ROM |
なし | ePPI、Sport(2)、 クワッド/デュアルSPI (3)、I2C、UART(2) 、CAN 2.0B(2)、SD/ SDIO/MMC(4ビット) 、USB 2.0 HS OTG |
OTP、セキュリテ ィの強化、データ の完全性(L1パリ ティとL2 ECCによ る)、WDT、RTC |
88リードのQFN、 12 mm × 12 mm |
| ADSP-BF701 ADSP-BF703 ADSP-BF705 ADSP-BF707 |
16ビットのLPDDR、DDR2 | 上記のオプションに 加えてSDIO/MMC/eMMC (8ビット)、4チャンネ ル/12ビットのADC |
184ボールのBGA、12mm×12mm |
電磁式流量計に向けたADIのソリューション
ADIは、電磁式流量計を構成するシグナル・チェーン全体のプロトタイプとして、システム・レベルのリファレンス設計を開発しました。このプロトタイプは、任意の電磁式流量センサーに接続し、適切な励起周波数と電圧レベルを適用することによって、磁界を生成し(BlackfinシリーズのDSPによって制御)、センサーの出力を測定し、後処理用のフィルタとアルゴリズムを適用して流量を計算できるように構成されています。ADIは、実際の流体環境で図19に示す回路のキャリブレーションを実施したうえで、キャリブレーション用の係数をメモリに保存しました。シングルポイントまたはマルチポイントのキャリブレーションが可能ですが、マルチポイントの線形化を行うことによって性能を向上させることができます。このようにして、設計したアナログ・フロントエンド回路により、最高水準の流量計に対応可能であることが実証できました。
オーバーサンプリング型のアーキテクチャには、従来型のアーキテクチャに勝るいくつかのメリットがあります。まず、実装面積とコストについては、それぞれ最大50%、最大20%削減することができます。センサーからの信号を保存しておき、後処理を適用することが可能なので、消費電力とシステム性能の面でもメリットが得られます。ADIのリファレンス設計についてはcic@analog.comまでお問い合わせください。
ADIのソリューションの評価結果
キャリブレーション用の流量環境において、直径25mmの電磁式流量センサーを接続し、上記のリファレンス設計の評価を室温で行いました。励起周波数を6.25Hzに設定した場合、0.5~2m/sの範囲で基本的な読み取り誤差は±0.2%となりました。評価結果を表9にまとめます。
表9. オーバーサンプリング型デモ・ボードのキャリブレーション結果(流量計としては「DN25」を使用)
| 流量 (mps) | 読み取り誤差 (%) | 再現性 (%) |
| 2.05 | –0.14% | 0.00% |
| 1.01 | 0.03% | 0.03% |
| 0.49 | 0.07% | 0.04% |
| 0.21 | 0.42% | 0.08% |
| 0.10 | 1.15% | 0.01% |
| 0.05 | 2.74% | 0.06% |
まとめ
世界中、特に欧州においては、住宅廃棄物と産業廃棄物を監視/制御するための環境規制がますます厳しくなりつつあります。電磁式の流量測定は、そうした用途に適した技術です。しかし、従来の測定アーキテクチャは非常にアナログ的でした。コスト、実装面積、消費電力、応答時間に問題があることに加え、システムから得られる情報が限られるといった欠点もありました。そこで、現在ではオーバーサンプリング型のアーキテクチャが採用されるようになっています。このアーキテクチャでは、ADCに対してかなり高い要件が課せられます。更新レートが10倍単位で増加するのにもかかわらず、平均化のメリットを活用できないことから、ADCには高い更新レートにおけるノイズの面で優れた性能が求められるのです。それに加えて、消費電力の問題にも対処する必要があります。さまざまな種類の液体や管の直径に対応するには、動的に電力を制御しなければなりません。つまり、最小限の消費電力によって、あらゆる種類のセンサーに対応できる単一の設計が必要です。BlackfinシリーズのDSPは、消費電力の少なさと処理能力の高さという面で、流量測定のアプリケーションに最適です。100mW未満の消費電力で800MMACSという最高水準の処理能力が得られるため、消費電力を抑えつつ、複雑なFIRフィルタのアルゴリズムを実行して流量を計算することができます。それにより、全体的な設計は従来の方式と比べて格段に簡素化され、コスト、消費電力、実装面積が大きく削減されます。ADIのリファレンス設計についてはcic@analog.comまでお問い合わせください。
参考資料
John Ardizzoni「高速差動ADCドライバの「交通規則」」Analog Dialogue 43-05 、2009年5月
Alan Walsh「高精度SAR A/Dコンバータ(ADC)のフロントエンド・アンプとRCフィルタの設計」Analog Dialogue 46-12, 2012 年5月

