はじめに
民生分野や航空宇宙/防衛分野では、デジタル・フェーズド・アレイが多用されるようになりました。そのため、フェーズド・アレイ・アンテナにさほど詳しくない技術者であっても、その設計の様々な側面に向き合わなければならないケースが増えています。フェーズド・アレイ・アンテナの理論は、数十年もの時間をかけて十分に確立されています。したがって、その設計は目新しいものにはなりません。ただ、この技術に関する文献の多くは、アンテナを専門とし、電磁気学の数学的理論に精通した技術者を対象として執筆されています。そのようなものではなく、フェーズド・アレイ・アンテナのパターンについてより直感的に理解できるように説明した文献があれば、多くの技術者の役に立つかもしれません。フェーズド・アレイ・アンテナでは、ミックスドシグナル技術やデジタル技術がより多く利用されるようになっています。フェーズド・アレイ・アンテナの動作は、ミックスドシグナルやデジタルを専門とする技術者が日常的に扱う離散時間サンプル・システムと多くの点で似ています。
本稿の目的は、アンテナ設計技術者を育成することではありません。対象とするのは、フェーズド・アレイ・アンテナで使われるサブシステムやコンポーネントの開発に取り組む技術者です。そうした技術者に対し、その作業がフェーズド・アレイ・アンテナのパターンにどのような影響を及ぼすのかイメージできるようにすることを目的としています。
ビームの向き
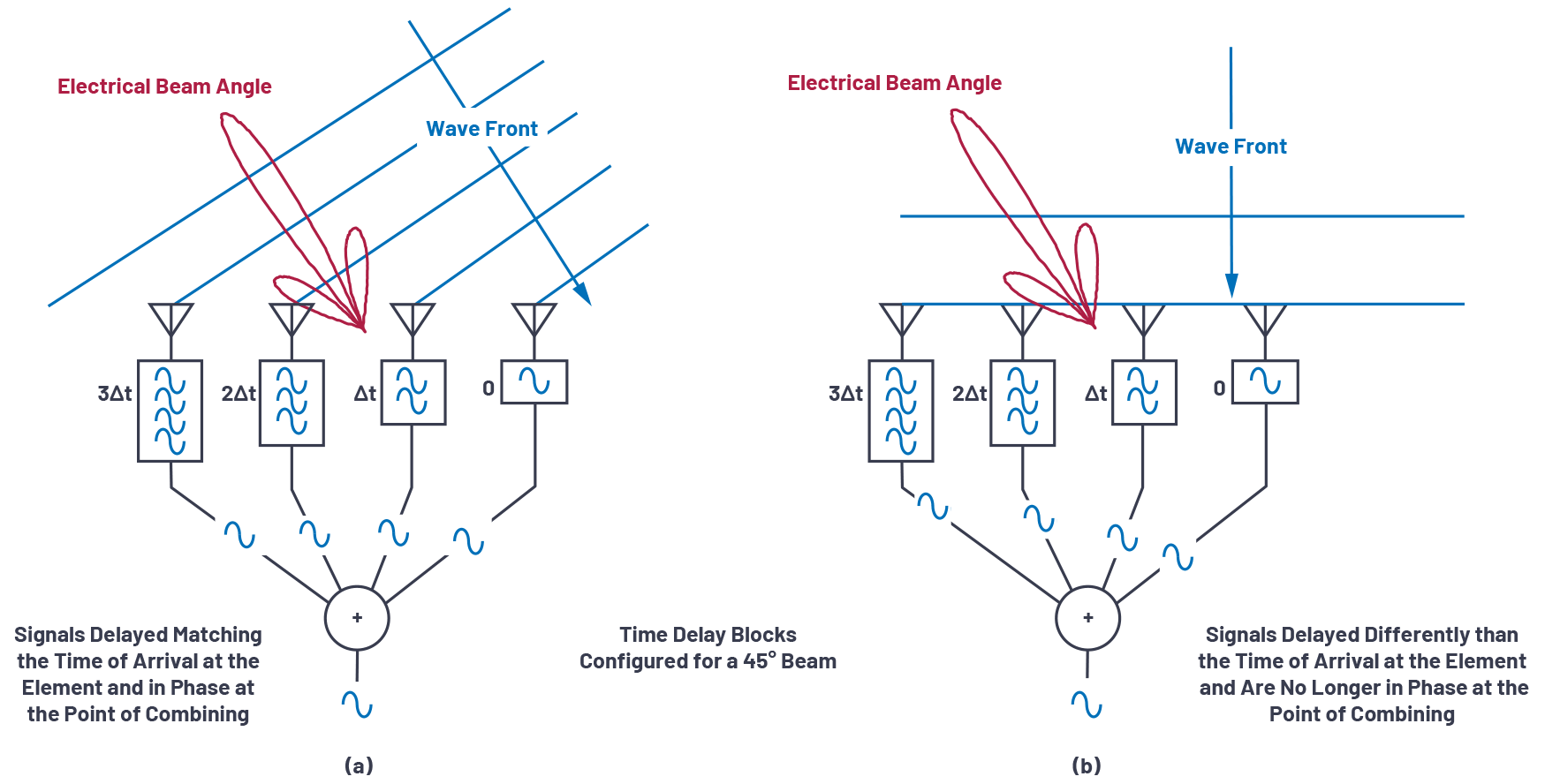
まず、フェーズド・アレイ・アンテナにおけるビーム・ステアリングについて直感的に理解するための例を示します。図1は、4つのアンテナ素子に2方向から入射する波面を簡単に示したものです。各アンテナ素子の後段に位置する受信パスでは、時間遅延を加えた上で4つの信号が結合(合算)されます。図1(a)では、各アンテナ素子に入射した波面の時間差と時間遅延がマッチしており、4つの信号は、位相が一致した状態で結合点に到着します。このコヒーレントな結合により、コンバイナの出力として1つの大きな信号が生成されます。図1(b)でも同じ時間遅延が適用されています。ただ、こちらは、波面がアンテナ素子に対して垂直に入射しています。加えられる時間遅延が4つの信号の位相と合っていないので、コンバイナの出力は著しく減衰します。

フェーズド・アレイ・アンテナにおいて、時間遅延とは、ビーム・ステアリングに必要で定量化が可能な時間差のことを表します。この遅延は、位相シフトによって代替することが可能です。実際、多くの実装では、一般的かつ実用的にこの処理が行われています。時間遅延と位相シフトの影響については、ビーム・スクイントのセクションで説明します。ここでは、まず位相シフトの実装方法(位相シフタ)を示します。その上で、その位相シフトを基にビーム・ステアリングに関する計算を行う方法を説明します。
図2に示したのは、時間遅延ではなく位相シフタを用いてフェーズド・アレイ・アンテナを構成した例です。ボアサイト(照準)の方向(θは0°)は、アンテナの面に対して垂直だと仮定しています。角度θについては、ボアサイトの方向の右側が正で、左側が負であるとします。

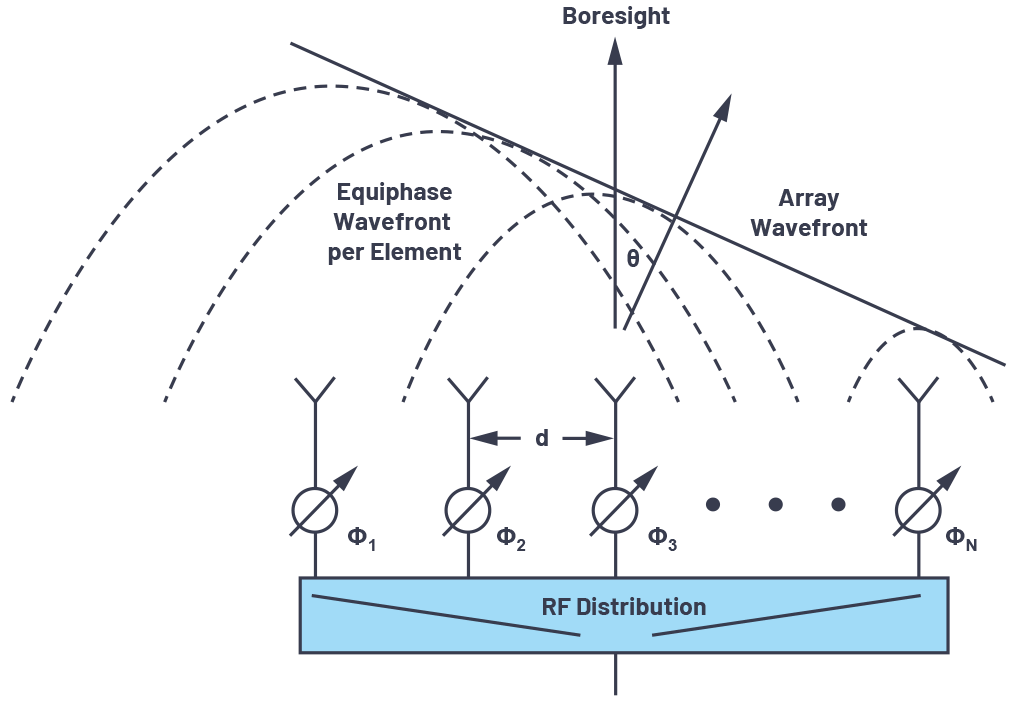
図3には、ビーム・ステアリングに必要な位相シフトを視覚化して示しました。ご覧のように、隣接する素子の間に一連の直角三角形を描画しています。ΔΦは、隣接する素子の間の位相シフトです。

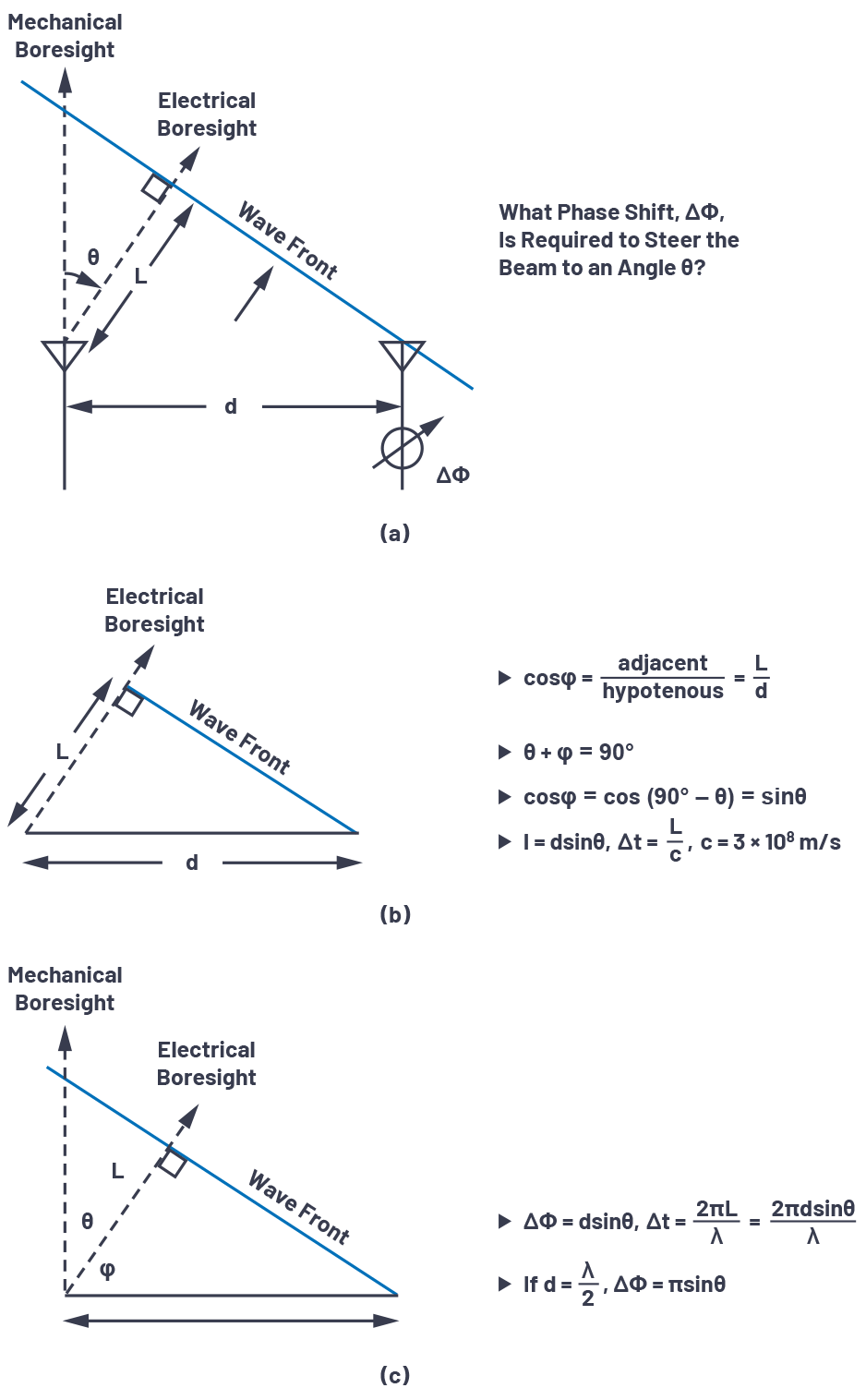
図3(a)は、素子間における三角法を表しています。各素子の間の距離はdです。ビームの向きはボアサイトから角度θだけずれており、水平方向に対する角度はφです。図3(b)に示すように、θとφの和は90°です。これにより、波動伝搬の差分距離Lは、dsin(θ)によって求めることができます。ビーム・ステアリングに必要な時間遅延は、波面が距離Lを横断する時間に等しくなります。Lが波長に対して非常に短いと考えると、その時間遅延を位相遅延に置き換えることが可能です。そうすると、ΔΦは、図3(c)と以下の式に示すように、θを使って計算することができます。

素子の間隔が信号の波長のちょうど1/2(λ/2)であれば、式(1)は次のように簡素化できます。

以下に、これらの式を使った計算例を紹介します。2つのアンテナ素子の間隔が15mmであるとします。10.6GHzの波面が機械的なボアサイトに対して30°の角度で入射する場合、2つの素子の間の最適な位相シフトは、どのような値になるでしょうか。
- θ = 30〔°〕 = 0.52〔rad〕
- λ = c/f = (3×108〔m/秒〕/10.6〔GHz〕 = 0.0283〔m〕
- ΔΦ = (2π×d×sinθ)/λ =2π×0.015×sin(0.52)/0.0283〔m〕= 1.67〔rad〕 =95〔°〕
つまり、波面がθ = 30°で入射する場合、隣接する素子の位相を95°シフトすると、両方の素子の個々の信号がコヒーレントに加算され、その方向のアンテナの利得が最大になります。
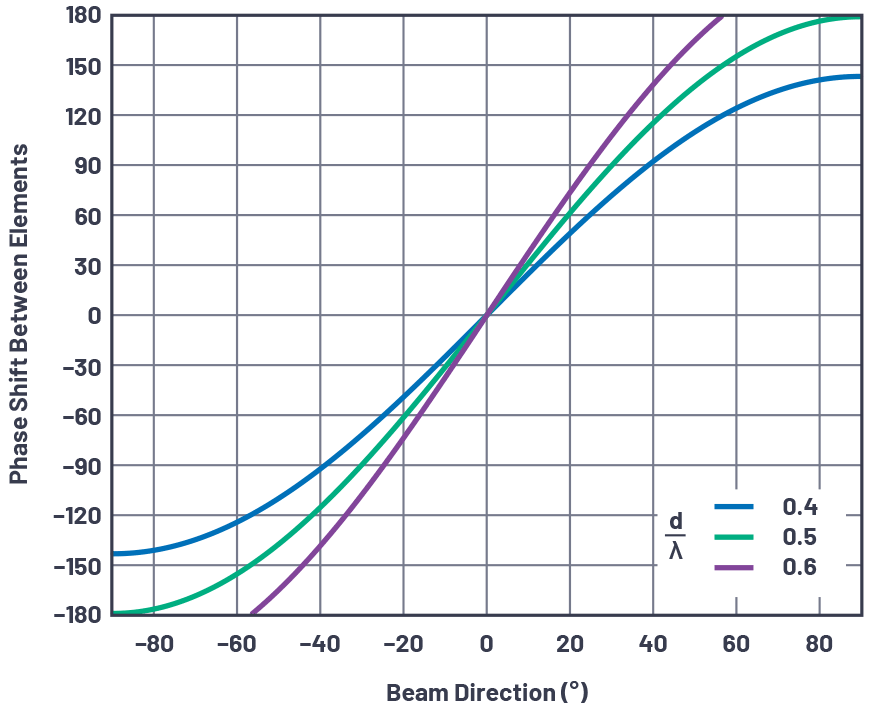
ビームの向きθにより、位相シフトはどのように変化するのでしょうか。これについて把握するために、いくつかの条件に対する計算結果を図4に示しました。このグラフから、興味深い事実がわかります。d = λ/2の場合、ボアサイトの近くの傾きは3程度です。これは、式(2)のπによるものです。d = λ/2である場合のグラフからは、素子間の位相を180°シフトすると、ビームの向きが理論的に90°シフトすることもわかります。しかし、これはあくまでも理想的な条件下における計算値であり、実際の素子パターンでは実現不可能です。一方、d > λ/2の場合には、どれだけ位相をシフトしてもビームを90°シフトすることはできません。後ほど、この条件では、アンテナ・パターンのグレーティング・ローブが発生する可能性があるということについて説明します。ここでは、d > λ/2の場合には何かが違うということだけ押さえておいてください。

等間隔のリニア・アレイ
上に示した計算式は、2つの素子だけに対応しています。実際のフェーズド・アレイ・アンテナは、2次元に配列された数千もの素子で構成されることがあります。ただ、本稿では、1次元に配列されたリニア・アレイを対象として説明を行うことにします。
ここで言うリニア・アレイとは、N個の素子が1列に並んだアレイのことです。各素子の間隔に決まりはありませんが、一般的には等間隔で設計されます。そこで、本稿でも、各素子が等間隔dで並んでいるケースを考えます(図5)。等間隔のリニア・アレイのモデルは、簡単なものではありますが、様々な条件下でアンテナのパターンがどのように形成されるのかを理解する上での基盤になります。リニア・アレイにおける原理を応用することにより、2次元アレイについて理解することが可能になります。


近接場と遠方場
先ほどNが2のリニア・アレイに対して立てた計算式を、Nが1万のリニア・アレイに適用するには、どうすればよいでしょうか。図6に示すように、球形の波面に対する各アンテナ素子の角度は、少しずつ異なっているはずです。

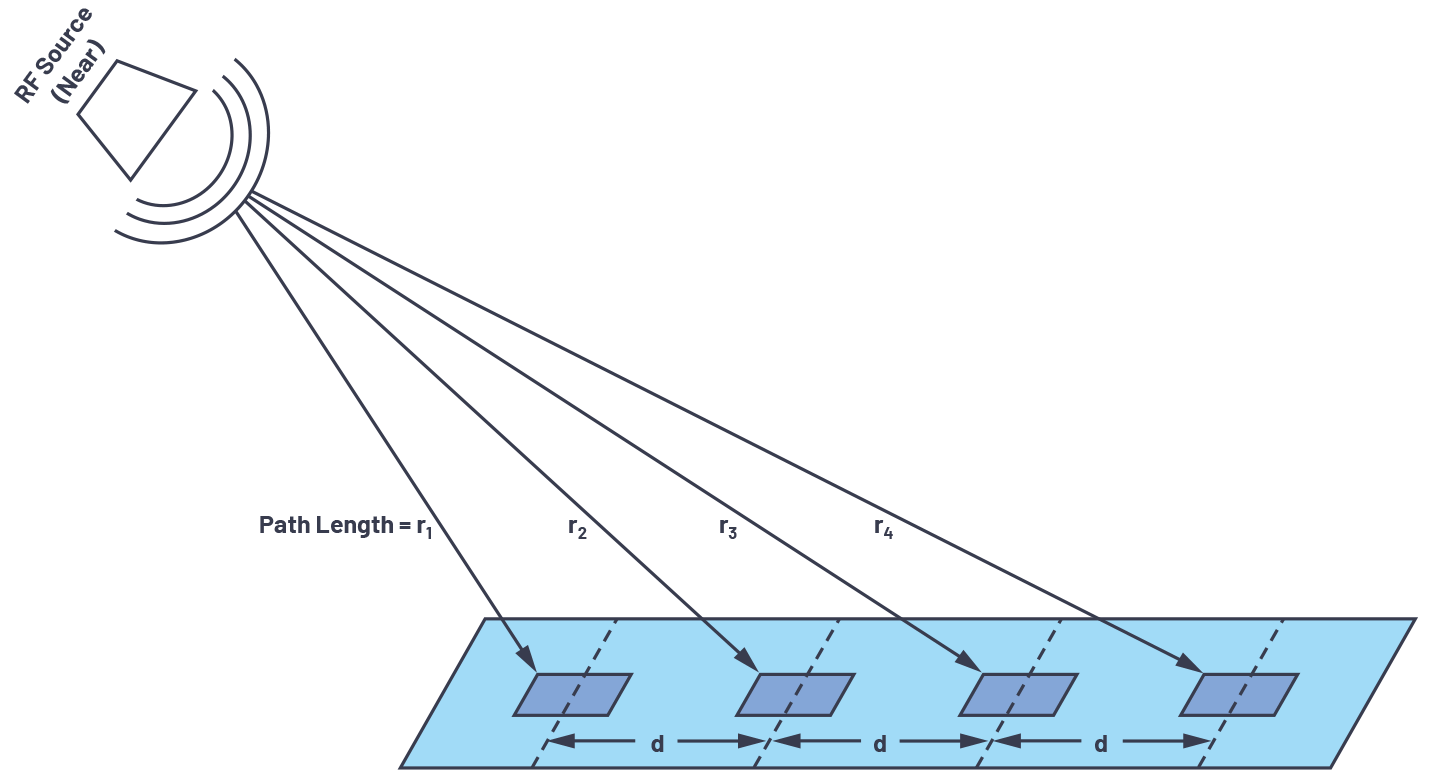
RFソースが近くにある場合、入射角は素子ごとに異なります。このような状況を近接場と呼びます。それぞれの入射角を求めて、それぞれに対処することは不可能ではありません。また、テスト用のシステムはそれほど大きなものにはならないことから、アンテナのテストやキャリブレーションのために、そのような対処を行わなければならないケースもあります。しかし、RFソースが遠く離れた位置にあるとすれば(遠方場)、図7のように考えることも可能です。

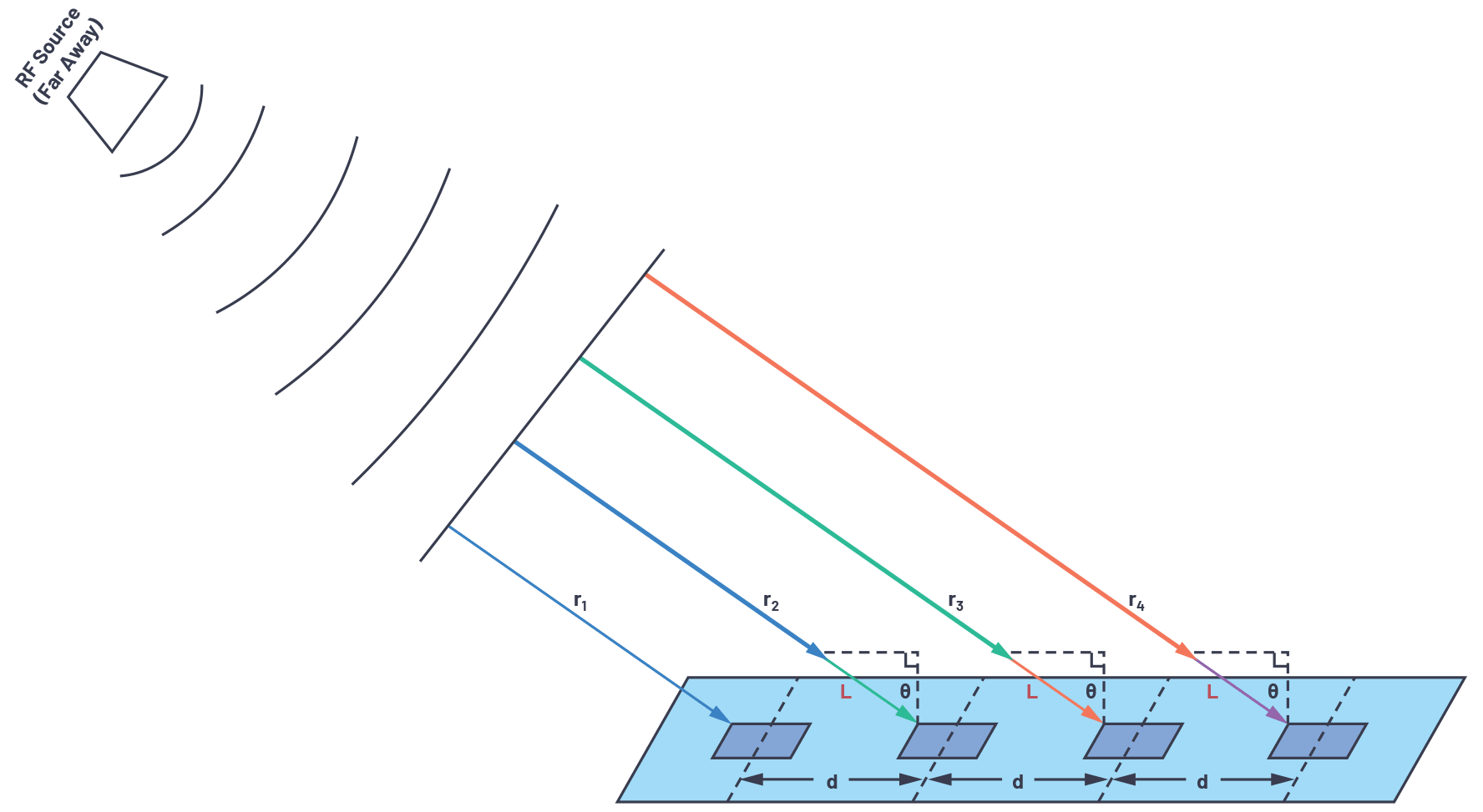
RFソースが遠く離れた位置にある場合、球形の波面の半径は大きく、波動の伝搬パスはほぼ平行だと見なすことができます。そうすると、ビーム角はすべて等しく、隣接するどの素子をとっても、パス長の差はL = d×sinθとなります。この関係から計算式を簡素化することが可能です。上で示した2つの素子に対する計算式は、素子が数千個であっても間隔が均等であれば、そのまま適用できるということです。
では、どれだけの距離があれば、遠方場だと見なすことができるのでしょうか。やや主観的にはなりますが、一般的には、以下の条件を満たせば遠方場と見なすことが可能です。

ここで、Dはアンテナの直径です。この等間隔のリニア・アレイでは、(N-1)×dとなります。
アレイが小さい(Dが小さい)か、周波数が低い(λが大きい)場合には、遠方場の距離の値は小さくなります。しかし、アレイが大きい(または周波数が高い)場合には、遠方場の距離は数kmにも及ぶ可能性があります。そうすると、アレイのテストやキャリブレーションは容易ではありません。そのような場合には、より詳細な近接モデルを使用し、実際に使用する遠方場のアレイにそれを適用します。
利得、指向性、アパーチャ
ここで、アンテナの利得、指向性、アパーチャについて定義しておきましょう。まずは、同義的に用いられることも多い利得と指向性を取り上げます。これら2つは、等方性アンテナを基準とします。等方性アンテナというのは、全方向に均等に放射する理想的なアンテナのことです。指向性は、全方向に放射される平均電力Pavに対する特定方向の最大測定電力Pmaxの比として表されます。方向が定義されていない場合、指向性は次式で求められます。

指向性を使えば、放射エネルギーを集約する能力を定義することができます。そのため、アンテナの比較を行う際、有用な指標として使用できます。一方の利得は、指向性と似ていますが、アンテナの損失も含んだ値になります(以下参照)。

ここで、k = Prad/Pinです。Pradは合計放射電力、Pinはアンテナへの入力電力を表します。kは、アンテナの放射プロセスにおける損失に相当します。
次に、アンテナのパターンを3次元の関数として考え、指向性をビーム幅の関数として考えてみます。

球の表面積は4πr2です。球面上の領域は、ステラジアンの単位で表されます。球面全体は4πステラジアンです。したがって、等方性アンテナからの電力密度(単位はW/m2)は次式で表せます。

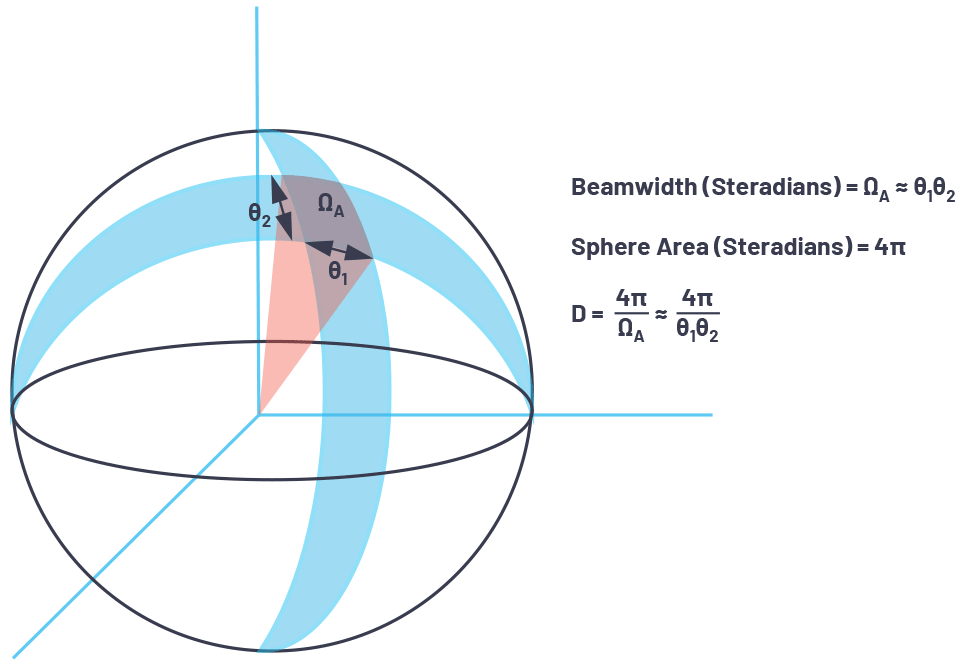
球面上の領域には、角度の方向が2つあります。レーダー・システムでは、それぞれ方位角、仰角と呼ばれています。ビーム幅は、2つの角方向θ1とθ2の関数で表すことができます。θ1とθ2を組み合わせれば、球面上の領域ΩAを表現することが可能です。
ΩAは、ステラジアンを単位とするビーム幅で、ΩA≒θ1×θ2と近似できます。
ΩAを使用すると、指向性は次式のように表すことができます。

続いて、アンテナのアパーチャについて説明します。アパーチャとは、電磁波を受信できる実効領域のことです。これは、波長の関数として表せます。等方性アンテナのアパーチャは、次式のようになります。

利得は等方性の放射を基準とします。そのため、アンテナの実効アパーチャは次のようになります。

利得は放射パターンを定義する角度の関数であり、アンテナの効率(または損失)を表すと考えることができます。
リニア・アレイのアレイ・ファクタ
ここまでの説明により、アンテナにおいて最大限の指向性を達成するために、素子間の最適な時間差(または位相差)を予測できるようになりました。続いては、アンテナの利得パターンについて理解し、それを操作できるようにするにはどうすればよいのか説明します。アンテナの利得パターンは、主に2つの要素から成ります(図9)。1つは、アレイを構成する個々の素子(おそらくは1つのパッチ)の利得です。これは、エレメント・ファクタGEと呼ばれます。もう1つは、アレイのビームフォーミングによって影響を与えることのできる要素であり、アレイ・ファクタGAと呼ばれています。アレイ全体の利得パターンは、以下に示すように、これら2つの要素を組み合わせたものになります(以下参照)。


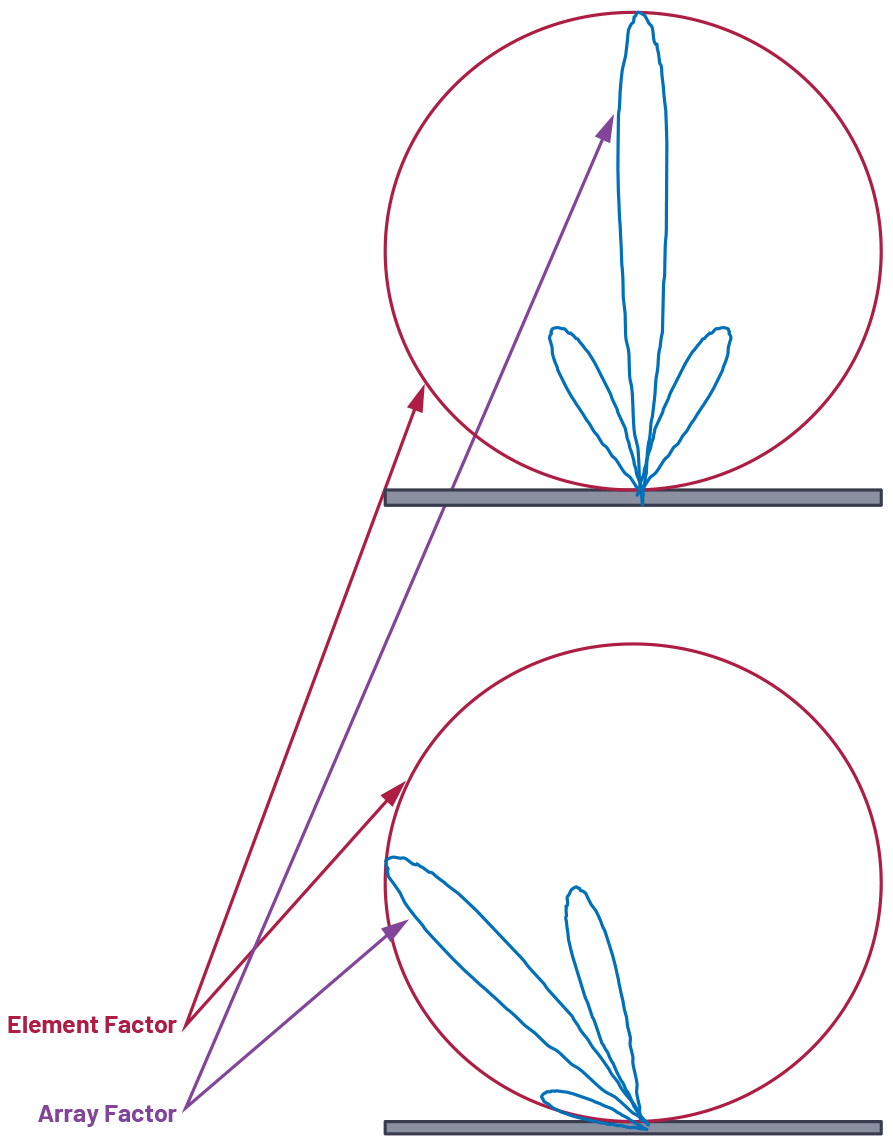
エレメント・ファクタGEは、アレイに含まれる1つの素子の放射パターンです。アンテナの形状と構造によって決まるものであり、電気的な制御によって変化させることはできません。フェーズド・アレイ・アンテナ全体の利得に対して影響を及ぼす固定の因子です。特に水平線の近くでは、これがアレイ全体の利得を制限することを覚えておいてください。本稿では、すべての素子でエレメント・ファクタは同一であると仮定します。
注目すべきはアレイ・ファクタGAです。アレイ・ファクタは、アレイのサイズ(本稿で前提とする等間隔のリニア・アレイの場合はd)とビームの振幅/位相を基に計算します。等間隔のリニア・アレイの場合、アレイ・ファクタの計算方法は至って単純です。詳細については、稿末に挙げた参考資料をご覧ください。
リニア・アレイにおけるパラメータの定義方法は文献によって異なり、計算式にも違いが見られます。ここでは、前掲の計算式を使用し、図2、図3の定義との一貫性が得られるようにします。問題なのは、利得がどのように変化するのかを把握することです。より有益に理解するためには、ユニティ・ゲイン(利得は1)を基準として正規化されたアレイ・ファクタをプロットするとよいでしょう。そのようにして正規化を施す場合、アレイ・ファクタは次式で求められます。


ここで、θ0はビーム角です。この角度θ0は、素子間の位相シフトΔΦの関数として既に定義済みです。したがって、この式は以下のように書き直すことができます。

このアレイ・ファクタの計算式は、以下のような仮定に基づいています。
- 素子は等間隔です。
- 素子間の位相シフトは同じ値です。
- 素子の振幅はすべて同じ値です。
上記の式を使用して、素子数やビーム角が異なるアレイのアレイ・ファクタをプロットしてみましょう。その結果は図10、図11のようになります。

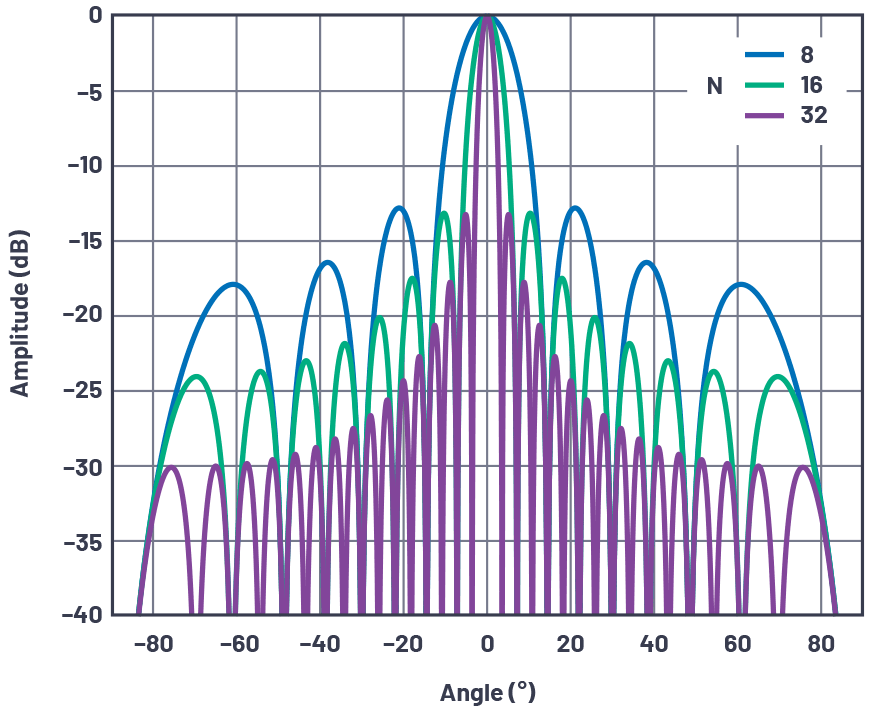

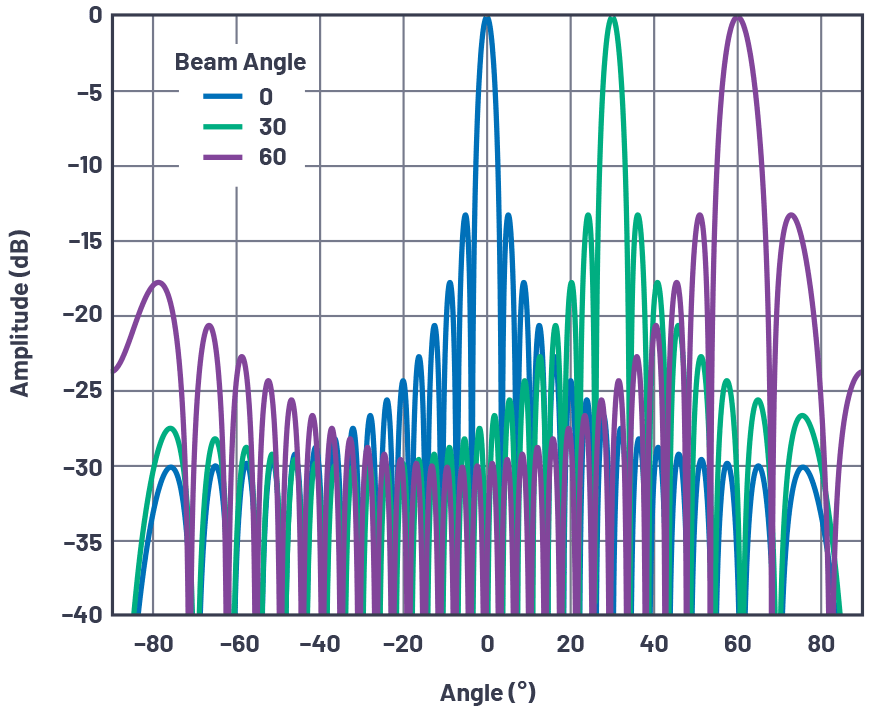
図10、図11から、以下のようなことがわかります。
- 素子数にかかわらず、最初のサイドローブは-13dBcです。これは、アレイ・ファクタの式におけるsin関数に起因します。サイドローブは、素子の利得を徐々に小さくすることによって改善可能です。これについては、本稿の Part 2 以降で取り上げる予定です。
- ビーム幅は素子数の増加に伴って狭くなります。
- ビーム幅は、ビームがボアサイトから遠いほど広くなります。
- ヌルの数は、素子数の増加に伴って増加します。
ビーム幅
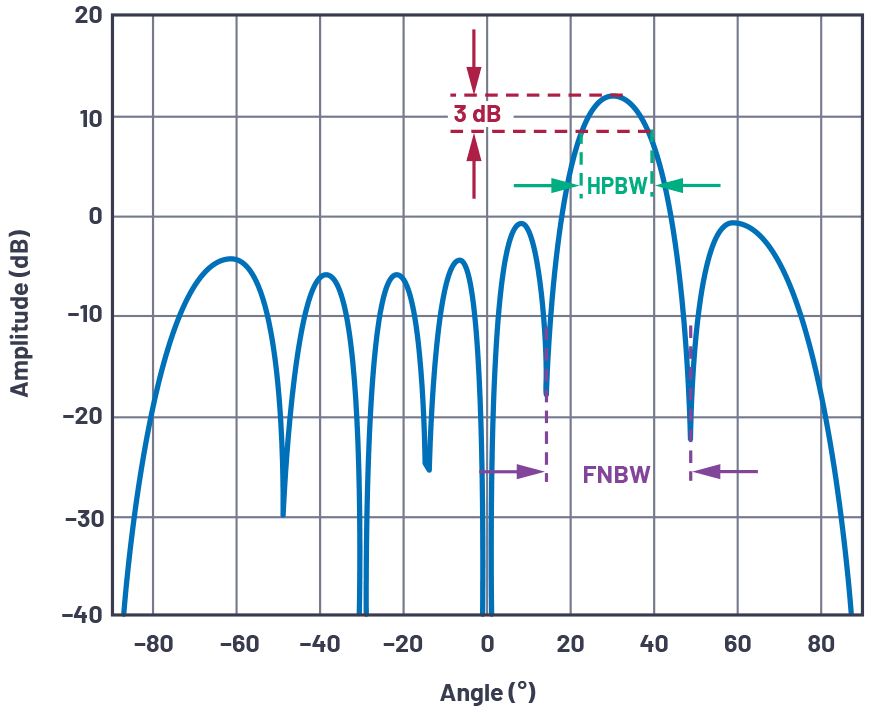
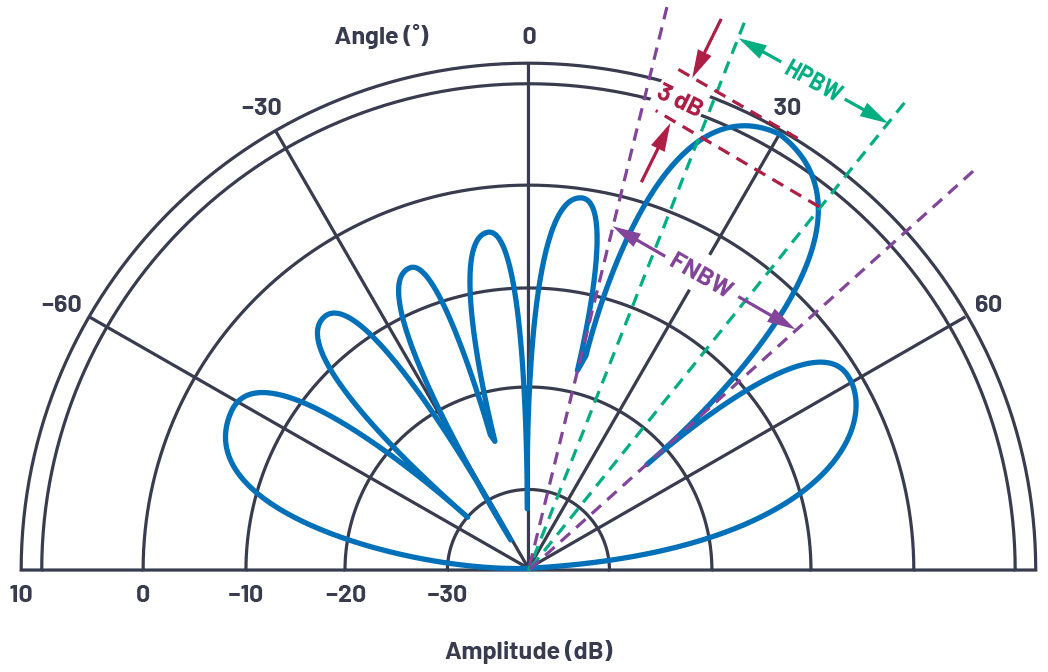
ビーム幅は、アンテナにおける角度分解能の指標になります。その値は、半値電力ビーム幅(HPBW:Half-power Beamwidth)またはメイン・ローブのヌルからヌルまでの間隔(FNBW)で定義するのが一般的です。HPBWの値は、図12に示すように、ピークから-3dBの位置における角距離を測定することで取得します。

先ほどの正規化したアレイ・ファクタの式を使用して、式(13)を半値電力レベル(-3dBまたは 1/√2倍)にすることにより、HPBWを計算することができます。代入する値としては、機械的なボアサイトθが0、Nが8、dがλ/2とします。

これを計算すると、ΔΦとして0.35radという値が得られます。ここで式(1)を使用し、以下のようにθを求めます。

このθは、ピークから-3dBのポイントまでの距離に相当します。つまり、HPBWの1/2の値です。したがって、これを2倍すると、-3dBのポイント間の角距離が得られます。つまり、HPBWは12.8°となります。
アレイ・ファクタを0として同じ計算を行うと、最初のヌルからヌルまでの間隔であるFNBWが求められます。例えば、上述したのと同じ条件下では、28.5°という値が得られます。
等間隔のリニア・アレイの場合、HPBW [1,2] は、以下の式で近似できます。

図13は、素子数が異なる場合のビーム幅とビーム角の関係を示したものです。素子の間隔はλ/2としています。

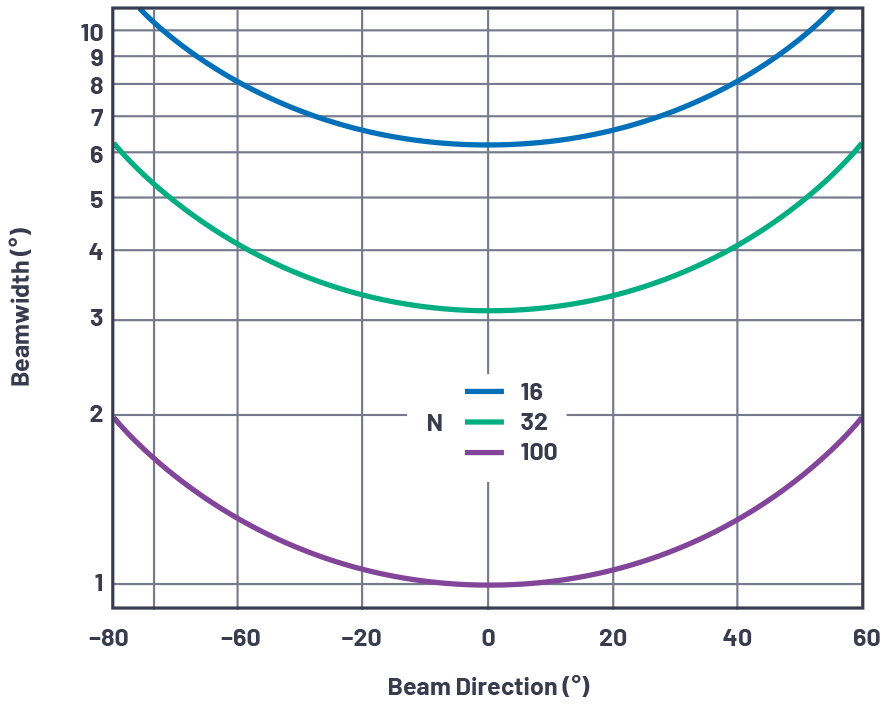
このグラフから、業界で開発されているアレイのサイズについて、以下のようなことがわかります。
- ビームにおいて1°の精度を得るには、100個の素子が必要です。方位角と仰角の両方でその精度を得たい場合には、必要なアレイの素子数は1万個になります。1°の精度が得られるのは、理想に近い条件下のボアサイトにおいてのみです。配備済みアレイにおいて、様々な走査角度にわたり1°の精度を得るには、更に素子数を増やす必要があります。つまり、非常に大きいアレイのビーム幅には、実用的なレベルでは限界が存在するということです。
- 一般的には、1000素子のアレイが使用されています。各方向の素子数を32にすると、総素子数は1024になります。その場合、ボアサイトの近くにおけるビームの精度は4°未満になります。
- 低コストで量産が可能な256素子のアレイでも、10°未満のビーム指向精度を達成することができます。多くのアプリケーションでは、それで十分な可能性があります。
- すべてのケースにおいて、オフセットが60°になるとビーム幅は2倍になることに注意してください。これは、cosθが分母に存在するからであり、アレイのフォアショートニングに起因します。フォアショートニングとは、ある角度から見た場合に、アレイの断面が小さくなる現象のことです。
エレメント・ファクタとアレイ・ファクタの結合
1つ前のセクションでは、アレイ・ファクタだけについて考察しました。しかし、アンテナ全体の利得を求めるには、エレメント・ファクタも考慮する必要があります。図14に示したグラフをご覧ください。この例では、シンプルなcos波形をエレメント・ファクタとして使用しています。つまり、正規化された素子利得GE(θ)としてcos波形を使用するということです。cos波形でのロールオフは、フェーズド・アレイ・アンテナに関する解析でよく使用されます。平面で考察している場合に視覚化の手段として役に立つからです。この方法を用いた場合、ブロードサイドにおいて領域が最大になります。ブロードサイドから角度が離れるに連れ、cos関数に従って可視領域が縮小します。
素子の間隔がλ/2で、均等な放射パターンを持つ16素子のリニア・アレイに対し、アレイ・ファクタGA(θ)を適用したとします。トータルのパターンは、エレメント・ファクタとアレイ・ファクタを線形乗算したものになり、それらはdB単位で加算することができます。

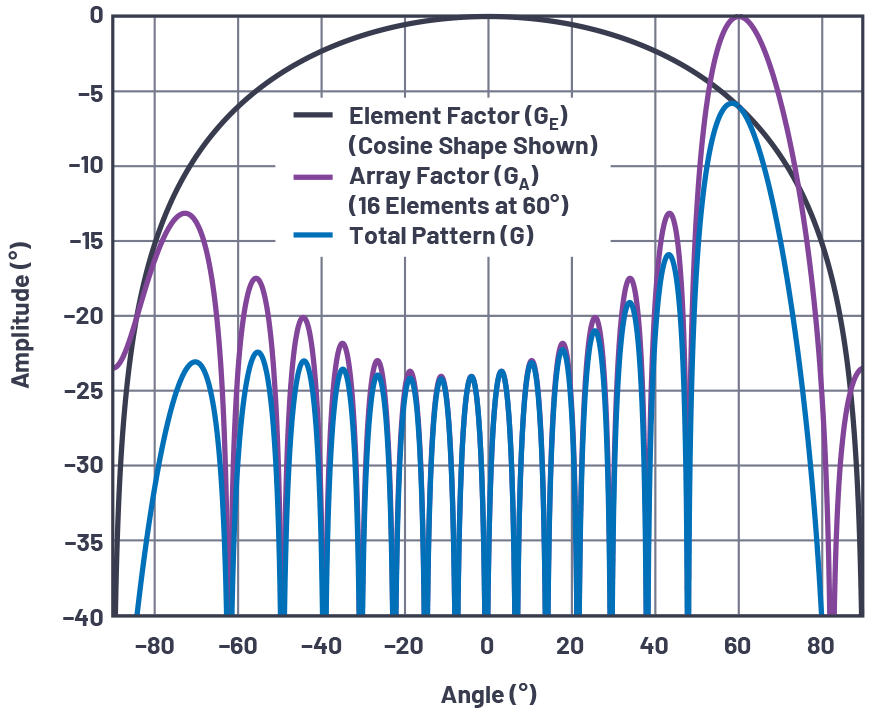
ビームがボアサイトから離れるに従い、以下のようになることがわかります。
- メインのビームの振幅は、エレメント・ファクタに比例して減少します。
- ボアサイトのサイドローブの振幅は減衰しません。
- そのため、ボアサイトから離れると、アレイ全体で見た場合のサイドローブでの性能が低下します。
直交座標と極座標
本稿では、ここまでアンテナのパターンを表すために、直交座標のプロットを使用してきました。しかし、一般的には、極座標のプロットの方がよく使われます。極座標の方が、アンテナから空間的に放射されるエネルギーを忠実に表現できるからです。図15は、図12のプロットを極座標で描き直したものです。直交座標と極座標という違いがあるだけで、データ自体は全く同じです。文献ではどちらも使用されるので、アンテナのパターンは両座標で視覚化できるようにしておくべきでしょう。なお、本稿で直交座標を使用しているのは、その方がビーム幅やサイドローブの性能を比較しやすいからです。

送信側のアレイ
本稿では、ここまで信号を受信する側のアレイを対象としてきました。では、送信側のアレイでは、内容にどのような違いが出るのでしょうか。幸い、ほとんどの場合には、送信側のアレイについても図、式、用語としては受信側のアレイと同じものを適用できます。アレイがビームを受信すると考える方がわかりやすい場合もありますが、グレーティング・ローブについては、アレイがビームを送信すると考えた方が直感的に理解できるかもしれません。本稿では、受信側のアレイに基づいて説明を行いますが、それではイメージをつかみにくいと感じた場合には、送信側に置き換えて考えてみるとよいでしょう。
まとめ
以上、Part 1では、フェーズド・アレイ・アンテナにおけるビーム・ステアリングの概念について説明しました。具体的には、ビーム・ステアリングについて理解していただくために、アレイ全体の位相シフトを計算する式を導き、結果を図示しました。続いて、アレイ・ファクタとエレメント・ファクタについて定義すると共に、素子の数、素子の間隔、ビーム角がアンテナの応答に与える影響について考察しました。更に、直交座標と極座標でアンテナのパターンを示して両者を比較しました。
Part 2以降では、フェーズド・アレイ・アンテナのパターンと障害について詳しく解説する予定です。アンテナのテーパリングによってサイドローブがどのように低下するのか、グレーティング・ローブはどのように形成されるのか、広帯域のシステムでは位相シフトと時間遅延によってどのような影響が出るのかといった話題を取り上げるつもりです。最終的には、遅延ブロックの有限分解能について分析します。それによってどのように量子化サイドローブが生成され、ビームの分解能がどのように低下するのかということを示す予定です。
参考資料
Constantine A. Balanis「Antenna Theory: Analysis and Design. Third edition(アンテナの理論:分析と設計 第3版)」Wiley、 2005年
Robert J. Mailloux「Phased Array Antenna Handbook. Second edition(フェーズド・アレイ・アンテナ・ハンドブック 第2版)」Artech House、2005年
Robert M. O'Donnell「Radar Systems Engineering:Introduction(レーダー・システム・エンジニアリング:概要)」IEEE、2012年6月
Merrill Skolnik「Radar Handbook. Third edition(レーダー・ハンドブック 第3版)」McGraw-Hill、2008年


