要約
スイッチング・レギュレータを採用すれば、旧来型のリニア・レギュレータと比べて高い効率が得られます。また、昇圧、降圧、反転の処理に対応できるだけでなく、入力側と出力側を絶縁することも可能になります。本稿では、まずDC/DC変換に使われる様々な種類のスイッチング・レギュレータについて概観します。加えて、各種レギュレータの基本的な回路構成や仕組みを押さえます。
はじめに
初期のスイッチング・レギュレータでは、パワー・スイッチが実用性の鍵になる要素でした。VMOS(Vertical Metal Oxide Semiconductor)ベースのパワー・スイッチが発明される前のスイッチング・レギュレータは、概して実用的なものではありませんでした。
また、スイッチング・レギュレータではインダクタが使用されます。その1つの役割は、パワー・スイッチに流れる電流のスルー・レートを制限することです。インダクタを使用しないとしたら、ピーク電流はスイッチの抵抗だけによって制限されることになります。インダクタを使用することによって得られる最大のメリットは、エネルギーを蓄積できる点にあります。そのエネルギー(単位はJ)は、以下のように電流の関数として表すことができます。
- E = ½ × L × I²
一方、リニア・レギュレータでは、抵抗性の電圧降下を利用して出力電圧をレギュレートします。この手法では、発熱という形で電力(降下電圧と電流の積)が消費されます。つまり、大きな損失が発生するということです。スイッチング・レギュレータで使用するインダクタでも電圧降下は発生します。また、それに関連する電流が流れます。しかし、それらの電圧と電流は位相が90°ずれています。そのため、インダクタにはエネルギーが蓄積されることになります。そして、そのエネルギーはスイッチング・サイクルの放電フェーズに利用することが可能です。その結果、リニア・レギュレータと比べてスイッチング・レギュレータの効率ははるかに高くなります。効率がはるかに高いということは、発熱ははるかに少なくなるということを意味します。
スイッチング・レギュレータのトポロジ
スイッチング・レギュレータは、パワー・スイッチ、インダクタ、ダイオードを活用することにより、入力から出力にエネルギーを伝送する回路です。
それらの基本的なコンポーネントを組み合わせることにより、スイッチング回路を構成します。各コンポーネントの配置/接続を変更することにより、降圧(ステップダウン)コンバータ、昇圧(ステップアップ)コンバータ、反転(フライバック)コンバータを実現できます。図1~図4は、各トポロジの概念を示したものです。図3と図4は、トランスとダイオードの極性を除けば同様の構造を成していると言えます。これらの回路の周りにフィードバック回路や制御回路を注意深く設けることにより、安定してエネルギーを伝送できるようになります。その結果、通常の動作条件範囲内で、一定の出力を得ることが可能になります。
図1. 降圧コンバータのトポロジ
図2. 昇圧コンバータのトポロジ
図3. 反転コンバータのトポロジ
図4. トランスを使用するフライバック・コンバータのトポロジ
なぜスイッチング・レギュレータを使用するのか?
スイッチング・レギュレータには、リニア・レギュレータに勝るいくつかの長所があります。1つは、はるかに高い変換効率が得られることです。また、変換時に失われるエネルギーが少ないことから、小型のコンポーネントを使用できます。それだけでなく、熱管理も容易になります。加えて、スイッチング・レギュレータのインダクタに蓄積されるエネルギーを基に、入力よりも高い出力電圧(昇圧)や負の出力電圧(反転)を生成することができます。更には、トランスを介すように回路を構成することで、電気的な絶縁も実現可能です(前掲の図4)。
上記のとおり、スイッチング・レギュレータにはいくつもの長所があります。それを踏まえると、「リニア・レギュレータを使用すべきケースというのは存在するのか」という疑問が生じるかもしれません。実は、リニア・レギュレータにもスイッチング・レギュレータに勝る長所が存在します。それは、ノイズが小さく、帯域幅が広いことです。また、リニア・レギュレータを構成する回路はシンプルなので、より安価なソリューションとして活用できるケースもあります。
スイッチング・レギュレータには、リニア・レギュレータと比べて劣る部分も存在します。1つはノイズが大きいことです。また、制御ループを使用してエネルギーを管理しなければならない点も短所だと言えるでしょう。ただ、スイッチング・レギュレータを構成するためのコントローラICには、制御の問題を解消するためのソリューションが組み込まれています。
充電フェーズの動作
図5は、充電フェーズの動作を示したものです。図中のスイッチが長時間開いた状態にあり、ダイオードの両端の電圧降下が負であるとすると、コンデンサの両端の電圧は入力電圧と同じになります。スイッチが閉じると、入力電圧+VINがインダクタに印加されます。そして、ダイオードは、コンデンサによって+VOUTからグラウンドに放電が行われることを阻止します。入力電圧はDCなので、インダクタを流れる電流は時間の経過と共に直線的に増加します。その傾きは、入力電圧をインダクタンスで割った値に比例します。
図5. 充電フェーズの動作。スイッチが閉じると、インダクタを流れる電流が増加します。
放電フェーズの動作
図6は放電フェーズの動作を示したものです。図中のスイッチが再び開くと、インダクタの電流が整流ダイオードに流れて出力コンデンサを充電します。出力電圧が上昇すると、インダクタを流れる電流の傾きdi/dtが反転します。出力電圧は、以下の式で表される平衡状態に達するまで上昇します。
- VL = L × di/dt
インダクタの電圧が上昇すると、インダクタに流れる電流は急速に減少します。
図6. 放電フェーズの動作。スイッチが開くと、整流ダイオードを介して負荷に電流が流れます。
定常動作の状態において、スイッチングのサイクル全体を通したインダクタ両端の電圧の平均値はゼロになります。つまり、インダクタを流れる平均電流も定常状態にあるということになります。これは、インダクタをベースとする全トポロジを支配する重要な規則です。これに関する考察をもう一歩先に進めてみます。所定の充電時間tONと所定の入力電圧に対し、回路が平衡状態にあるとします。その場合、出力電圧に対する特定の放電時間tOFFが存在することになります。定常状態におけるインダクタの平均電圧はゼロになるはずなので、昇圧回路については次の式が成り立ちます。
- VIN × tON = tOFF × VL
また、次の関係も成立します。
- VOUT = VIN + VL
2つの式から、以下の式が導き出されます。
- VOUT = VIN × (1 + tON/tOFF)
ここで、次の式で表されるデューティ・サイクル(D)の概念を導入することにします。
- tON/(tON + tOFF) = D
すると、昇圧コンバータについては次の式が得られます。
- VOUT = VIN/(1-D)
同様の考え方に基づくと、降圧コンバータについては次の式が成り立ちます。
- VOUT = VIN × D
更に、反転(フライバック)コンバータについては次の式が成り立ちます。
- VOUT = VIN × D/(1-D)
制御の方法
昇圧、降圧、反転(フライバック)については、上記の式が成り立つことがわかりました。結論として、デューティ・サイクルを変更すれば、入力電圧に対する定常状態の出力を制御できます。これは、インダクタをベースとする全スイッチング・レギュレータに適用される重要な概念です。
スイッチング・レギュレータで最も一般的に用いられる制御方法があります。それは、パルス幅変調(PWM:Pulse Width Modulation)を利用するというものです(図7)。この方法では、出力電圧のサンプルを取得し、その値をリファレンス電圧の値から差し引きます。それにより、小さなエラー信号(VERROR)を求めます。そして、このエラー信号を発振器のランプ信号と比較します。その比較を担うコンパレータのデジタル出力(PWM信号)によって、パワー・スイッチを操作します。回路の出力電圧が変動すると、VERRORの値も変化します。その結果、コンパレータのスレッショルドも変化することになります。そうすると、出力パルスの幅(PWM)にも変化が生じます。このようにしてデューティ・サイクルが変化することで、エラー信号をゼロに抑える方向に出力電圧が変化します。PWM方式では、このような形で制御ループが機能します。
図7. PWMによる制御。変化するエラー信号を基にして、スイッチを制御するPWM信号が生成されます。
図8に示したのは、昇圧コンバータの実用的な回路例です。この回路では、コントローラICとして「MAX1932」を使用しています。その特徴の1つは、プログラマブルなD/Aコンバータ(DAC)を内蔵していることです。そのDACは、シリアル・リンクを介して出力電圧をデジタル的に設定するために使用します。図中の抵抗R5とR8から成る分圧器は、出力電圧を監視するためのものです。抵抗R6は、DACの出力電圧がリファレンス電圧(1.25V)と同じである場合には、実質的には回路に存在しないのと同じことになります。R6の両端の電圧がゼロなので、電流が流れないからです。DACの出力がゼロ(グラウンド)の場合、R6は実質的にはR8と並列に存在していることになります。これら2つの状態が、それぞれ出力調整範囲の最小値(40V)と最大値(90V)に対応します。
図8. 昇圧コンバータの回路例。MAX1932は、電圧モードの制御機能を備えるコントローラICです。
次に、1.25Vの内部リファレンス電圧から抵抗分圧器の信号が差し引かれ、その結果が増幅されます。このエラー信号は電流源となって、8番端子から出力されます。それと差動入力ペアによって、トランスコンダクタンス・アンプが形成されます。このような構成が使われる理由は、エラー・アンプの出力が高インピーダンス(電流源)であり、抵抗R7とコンデンサC4の値を変更することで回路のゲインを調整できるからです。また、この構成により、安定性を得るためのマージンを確保できるようループ・ゲインをトリミングすることも可能です。8番端子のエラー信号はコンパレータに送られます。その出力に応じてパワー・スイッチが駆動されます。図中のR1は、出力電流を測定するために使用する電流センス抵抗です。許容できないレベルの多くの電流が流れている場合には、PWM回路がシャットダウンする形で保護機能が働きます。
図7、図8の回路では、フィードバックを利用することで出力電圧をレギュレートします。このスイッチング・トポロジは、電圧モード制御(VMC:Voltage-mode Control)に分類されます。解析を実施する際には、ループ・ゲインが無限大である場合、理想的な電圧源の出力インピーダンスはゼロであると仮定することができます。VMCは広く使われている制御方法です。ただ、一般的な制御方法はもう1つあります。それが電流モード制御(CMC:Current-mode Control)です。この方法では出力電流をレギュレートします。無限大のループ・ゲインによって出力は高インピーダンス源となります。図9に示すように、CMCでは電流ループとそれよりも低速な電圧ループが入れ子の構造を成します。ランプ信号はインダクタを流れる電流の傾きによって生成され、エラー信号と比較されます。このような仕組みであることから、CMCでは出力信号が低下すると、負荷に対して更に多くの電流が供給されます。CMCの長所は、インダクタに流れる電流を管理できる点にあります。VMCでは、インダクタに流れる電流は測定しません。インダクタは、出力フィルタを構成するコンデンサと共に共振タンクを形成します。共振タンクは、リンギングや発振といった問題を引き起こす可能性があります。補償用のコンポーネントを注意深く選択すれば、VCMにおける共振を効果的に打ち消すことは可能です。ただ、それは容易な作業ではありません。それに対し、CMCではインダクタに流れる電流を検出してミスマッチを修正します。
図9. 電流モードのPWM制御
ここでは、POL(Point of Load)の用途に適した昇圧コンバータを紹介します。図10に示した回路では、コントローラとして「MAX668」を使用することでCMCを実現しています。図7や図8と同様の回路ですが、抵抗R1によってCMCに必要なインダクタの電流を検出する点が異なります。電流制限は、MAX668が内蔵する複数のコンパレータとR1によって行われます。抵抗R5とコンデンサC9を組み合わせることで、センス抵抗の部分に現れるスイッチング・ノイズを除去します。それにより、電流制限の機能が誤ってトリガされることを防ぎます。MAX668の場合、電流制限用のスレッショルドの値は内部で固定されています。電流制限の設定は、R1の値を変更することにより調整します。抵抗R2は、動作周波数の設定に使用します。MAX668は、DC/DC変換の広範な用途に対応する汎用的なICです。

図10. CMCで動作する昇圧コンバータ。MAX668を使用して構成しています。
MAX668では、大電力のアプリケーションに対する柔軟性を高めるために、定格電圧の高い外付けコンポーネントを使用することができます。消費電力の少ない可搬型のアプリケーション向けには、「MAX1760」や「MAX8627」をお勧めします。これらの製品では、内蔵するFETを使用し、その抵抗値によってインダクタの電流を検出/測定します。つまり、電流センス抵抗は必要ありません。
図11は、Maximが開発したQuick-PWM™のアーキテクチャを簡略化して示したものです。この降圧コンバータについて理解するために、まずはリファレンスによって定義されるレギュレーションのスレッショルドよりもフィードバック電圧が低い状態を考えます。順方向の電流フォールトが生じていない場合、DHのオン時間を計算するtON用のワンショット・タイマーがDHと共に直ちに作動します。tONの計算値は、出力電圧を入力電圧で割った値に基づき、定数Kで定義される固定スイッチング周波数を維持するために必要なオン時間の概算値となります。tON用のワンショット・タイマーが切れると、DHがオフになり、DLがオンになります。電圧がまだレギュレーションのスレッショルドより低い場合には、DHが直ちに再びオンになります。そうすると、インダクタの電流量は負荷の要件に対応するために急速に増加します。負荷に対して平衡な状態に達すると、インダクタの平均電圧はゼロになるはずです。したがって、次の式が成り立ちます。
- tON × (VIN - VOUT) = tOFF × VOUT
この式は、以下のように書き換えることができます。
- VOUT/(VIN - VOUT) = tON/tOFF
この式を展開して整理すると、以下の式が得られます。
- VOUT/VIN = tON/(tON + tOFF)
ここで、デューティ・サイクルDは次の式で表現できます。
- tON/(tON + tOFF) = D
したがって、降圧コンバータについては次の式が成り立ちます。
- D = VOUT/VIN
図11. Quick-PWMのアーキテクチャ
Maxim独自のQuick-PWMには、通常のPWMによる制御方式に勝るいくつかの長所があります。Quick-PWMでは、出力電圧がレギュレーションのスレッショルドを下回ると、新たなサイクルが生成されます。そうすると、大きなトランジェントによって出力が強制的に下げられ、直ちに新たなオンサイクルが開始します。この動作により、100ナノ秒の負荷ステップ応答が得られます。図1に示した降圧コンバータとは異なり、図11の回路では、放電パスとしてダイオードではなくMOSFET(Q2)が使用されています。これは注意すべき重要なポイントです。この設計であれば、ダイオードの降下電圧に伴う損失が発生しません。また、MOSFETのオン抵抗は電流センス抵抗としての役割も果たします。スイッチング動作が行われると出力電圧にはリップルが生じます。そのため、レギュレートされた状態を維持するには、出力フィルタとして機能するコンデンサといくらかの等価直列抵抗(ESR)が必要になります。Quick-PWMのアーキテクチャは、オン時間の計算部に入力電圧を直接供給することにより、ライン入力の変化にも素早く反応するようになっています。それに対し、他の手法では出力電圧の低下/急増を待ってから対策が講じられます。それでは遅すぎるアプリケーションが実際には多いはずです。
図12に示したのは、Quick-PWMを採用した降圧コンバータの実用的なアプリケーションの例です。この回路では、DDR(Double Data Rate)メモリの電源に適した製品として「MAX8632」を使用しています。同製品は、DDRメモリのVDDQ向けのものとしてQuick-PWMを採用した降圧回路を備えています。また、DDRメモリのVTT向けのものとして、バスのトランジェントを管理するための高速リニア・レギュレータも集積しています。先述したように、リニア・レギュレータにはスイッチング・レギュレータに勝る長所があります。リニア・レギュレータでは、電流のスルー・レートを制限するインダクタを使用しません。そのため、非常に高速に負荷トランジェントに対応できます。低速なレギュレータの場合、電源が負荷に対応できるレベルまで電流量を増やすまでの間、負荷に電流を供給するための大きなコンデンサが必要になります。
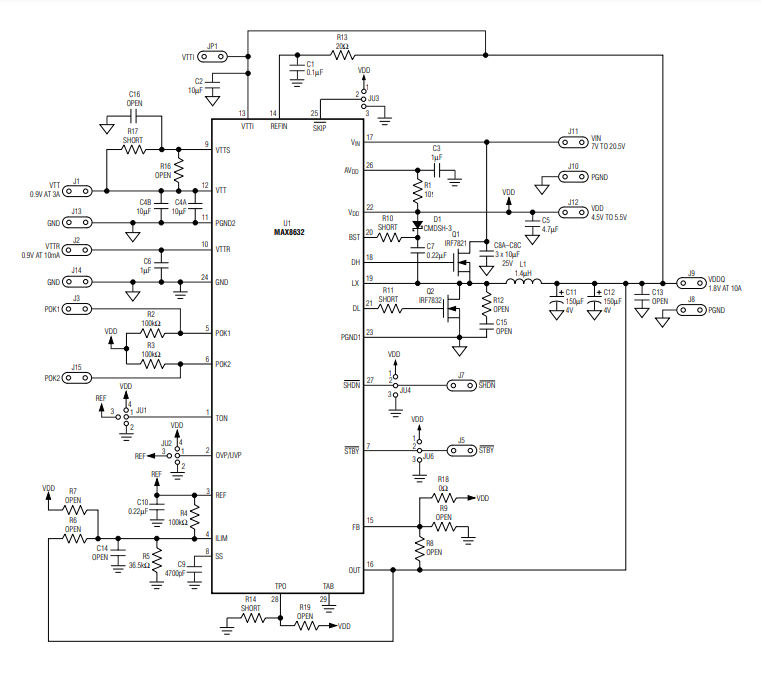
図12. MAX8632を使用して構成したDDRメモリ用の電源システム。同ICは、Quick-PWMのアーキテクチャを採用したスイッチング・レギュレータとリニア・レギュレータを内蔵しています。そのため、メインのGPUまたは標準的なコア・ロジック向けの完全な電源システムを構成できます。
画像を拡大 (PDF、76kB)
優れた効率
スイッチング・レギュレータで生じる電力損失の最大の原因は整流ダイオードです。それによって消費される電力は、順方向の降下電圧の値と電流の値の積として簡単に求められます。それだけでなく、シリコン・ダイオードの逆回復も損失の原因になり得ます。スイッチング・レギュレータでは、これらの電力損失によって全体的な効率が低下します。結果として、ヒート・シンクやファンを用いた熱管理が必要になるケースもあります。
上記のような損失を最小限に抑えるにはどうすればよいでしょうか。そのためには、順方向の降下電圧が比較的小さく、逆回復の特性が良好なショットキー・ダイオードを使用する方法が考えられるでしょう。しかし、最大限の効率を得るためには別の方法を採用すべきです。その方法とは、ダイオードの代わりにMOSFETを使用するというものです。この手法は同期整流方式として知られています。図13(右)に示したのが、同期整流方式の概念図です(前掲の図11、図12の回路もこの方式を採用しています)。同期整流方式で追加する同期整流用のスイッチは、メインのスイッチが閉じているときに開き、メインのスイッチが開いているときに閉じます。クロス・コンダクション(上下のスイッチが同時にオンになる状態)を防ぐために、スイッチングの方式はブレーク・ビフォー・メイクでなければなりません。そのため、メインのスイッチが開いてから同期整流用のスイッチが閉じるまでの間(デッド・タイム)の伝導には、やはりダイオードが必要になります。ただ、実際には別途ダイオードを追加する必要はありません。MOSFETを同期スイッチとして使用する場合、通常、電流は逆方向に(ソースからドレインへ)流れます。そのため、デッド・タイムの間は、MOSFETのボディ・ダイオードによって電流を流すことができます。同期整流用のスイッチが閉じると、電流はMOSFETのチャンネルを流れます。その際、MOSFETのオン抵抗は非常に小さく抑えられています。そのため、MOSFETを使用すれば、あたかも順方向の降下電圧がわずか数mVの整流ダイオードを使用しているような状態になります。以上のようなことから、同期整流方式を採用すれば、90%を優に上回る効率が得られます。
図13. 同期整流方式の降圧コンバータ。整流ダイオードをMOSFETに置き換えます。MOSFETのボディ・ダイオードも有効に機能します。
軽負荷時の効率を高めるスキップ・モード
多くの場合、スイッチング・レギュレータ用のコントローラICは、スキップ・モードという機能を備えています。このモードは、レギュレータの通常の動作サイクルが不要な場合にはそれをスキップするというものです。その目的は、軽負荷時の効率を大幅に高めることです。整流ダイオードを使用する標準的な降圧コンバータ(図1)の場合、新たなサイクルを開始しなければ、インダクタのエネルギー(電流)がゼロになるまで放電することができます。その状態では、ダイオードによってインダクタに逆方向の電流が流れることが阻止されます。その結果、インダクタの両端の電圧はゼロになります。この動作は「不連続モード」と呼ばれます(図14)。スキップ・モードでは、出力電圧がレギュレーションのスレッショルドを下回ると新たなサイクルが開始されます。同モードにおいて不連続な動作をしている間、スイッチング周波数は負荷電流に比例して変化します。同期整流用のMOSFETを使用する場合、状況はもう少し複雑になります。ゲートがオンのままである場合、インダクタの電流の向きがMOSFETにおいて反転する可能性があるからです。MAX8632は、インダクタに流れる電流の向きが反転したことを検知してスイッチを開くためのコンパレータを備えています。それを使用すれば、MOSFETのボディ・ダイオードによって逆電流を阻止することができます。
図14. 不連続モードにおける電圧と電流。インダクタが完全に放電した後、インダクタの電圧はゼロに保たれます。
図15は、MAX8632を使用した場合に得られる効率を示したものです。これを見ると、スキップ・モードを使用することにより軽負荷時の効率が向上することがわかります。但し、スイッチング周波数の値が固定ではないことからノイズが増加します。通常のPWM制御では、スイッチング周波数は一定の値に維持されます。その状態で、充電サイクルと放電サイクルの比率を変化させます。スイッチング周波数が固定であることから、周波数軸で見るとノイズのスペクトルは比較的狭い範囲に収まります。そのため、シンプルなローパス・フィルタやノッチ・フィルタを適用することにより、ピーク・ツー・ピークのリップル電圧を大幅に低減することができます。また、影響の小さい周波数帯にノイズが現れるように調整することも可能です。このような理由から、通常のPWM制御は、ノイズの干渉が問題となる通信アプリケーションなどで広く使用されています。
図15. MAX8632によって得られる効率。スキップ・モードを使用する場合と使用しない場合の結果を示しています。
まとめ
スイッチング・レギュレータは、リニア・レギュレータと比べると実装の難易度がやや高いと言えます。それでも、スイッチング・レギュレータは、多様な可搬型機器や据え置き型機器において、リニア・レギュレータをほぼ完全に置き換える存在となっています。なぜなら、スイッチング・レギュレータの方が高い効率が得られ、コンポーネントのサイズを抑えることができ、熱管理の問題を軽減することが可能であるからです。
レギュレータ製品の中には、パワー・スイッチ(MOSFET)とコントローラを集積したシングルチップのソリューションが存在します。「MAX1945」はその代表的な例です(図16)。このICの下面には、ダイから熱を放散するための金属スラグが設けられています。そのため、同ICのパッケージ(28ピンのTSSOP)は1Wを超える放熱性能を達成しています。その効果により、同ICは負荷に対して10Wを超える電力を供給することができます。スイッチング周波数を1MHzに設定した場合、インダクタとフィルタ用のコンデンサとしてはサイズの小さいものを選択できます。つまり、部品点数を減らしつつ、貴重な実装スペースを低減することが可能です。パワー・スイッチとして使用するMOSFETの技術が進化するにつれて、スイッチ・モードの性能も向上します。その結果、コスト、サイズ、熱管理に関する課題が更に軽減されます。
図16. MAX1945を使用する回路の例。このICは6Aの出力電流に対応可能なMOSFETを内蔵しています。部品点数と実装スペースを抑えられるので、基板の小型化に貢献できます。
この記事に関して
{{modalTitle}}
{{modalDescription}}
{{dropdownTitle}}
- {{defaultSelectedText}} {{#each projectNames}}
- {{name}} {{/each}} {{#if newProjectText}}
-
 {{newProjectText}}
{{/if}}
{{newProjectText}}
{{/if}}
{{newProjectTitle}}
{{projectNameErrorText}}
最新メディア 21