正確かつ高速に時間領域を測定することは難しいことではありますが、その手法の改善に役立つ情報は容易に入手できます。オシロスコープやプローブの基本を理解しておけば必ず役に立ちますし、いくつかのヒントやコツに、古くからある常識的な技術を組み合わせることによって、正確な結果をすばやく得られるようになります。以下に示すヒントと手法は、著者が過去25年にわたって蓄積したものです。いつもの測定手順にこれらを少しでも取り込むことができれば、結果の改善に役立つでしょう。
手近にあるスコープとプローブを適当に使用して高速測定を行おうとしても、うまく行きません。高速測定に適したスコープとプローブを選択する際は、最初に信号振幅、信号源インピーダンス、立上がり時間、帯域幅を考慮する必要があります。
オシロスコープとプローブの選択
オシロスコープは、きわめて簡易な携帯型モデルから、何十万ドルもするような専用のラックマウント式デジタル・ストレージ・スコープにいたるまで、何百種類もの製品が市販されています(プローブ単体で1万ドル以上する高級なものもあります)。また、このようなスコープに付属するプローブの多様さにも目を見張るものがあり、パッシブ型、アクティブ型、電流測定式、光式、高電圧型、差動型などの種類があります。入手可能なスコープとプローブのすべての種類を完全に説明することは本稿の範囲を超えていますので、ここではパッシブ・プローブを利用した高速電圧測定のスコープに焦点を絞ります。
ここでは、帯域幅が広く、立上がり時間が短い信号の測定に使用するスコープとプローブを取り上げます。これらの仕様に加えて、負荷(抵抗負荷、容量性負荷、誘導性負荷)に対する回路の感度についても把握しておく必要があります。高容量のプローブを使用すると、高速な立上がり時間に歪みが生じるおそれがあります。このため、一部のアプリケーションでは、回路にプローブが存在することを許容できない場合があります(たとえば、高速なアンプの中には、出力に容量が加わるとリンギングを生じるものもあります)。回路の制限と見込みを把握することにより、スコープとプローブの適切な組み合わせや、これらを使用する場合の最適な手法を選択できるようになります。
信号の帯域幅と立上がり時間によってスコープの選択が制限されます。一般的なガイドラインとして、スコープとプローブの帯域幅は、測定対象の信号の帯域幅の少なくとも3~5倍にする必要があります。
帯域幅
測定する信号がアナログ、デジタルいずれの回路で使用されていようと、スコープには信号を忠実に再現するだけの帯域幅が必要となります。アナログ測定の場合、測定対象の最大周波数によってスコープの帯域幅が決まります。デジタル測定の場合、必要な帯域幅を決めるのは通常、繰り返し率ではなく立上がり時間です。オシロスコープの帯域幅の特性は、-3dB周波数で決まります。これは、表示されているサイン波の振幅が入力振幅の70.7%に低下するポイントになります。つまり、次式で表すことができます。
 |
(1) |
オシロスコープに十分な帯域幅を持たせて誤差を最小限にすることが重要になります。また、オシロスコープの-3dB帯域幅近辺の周波数で測定を行わないようにする必要があります。この周波数付近で測定を行うと、サイン波の測定に30%の振幅誤差が自動的に生じることになるからです。図1は、「測定対象の最大周波数とスコープ帯域幅との比率」に対する「振幅精度の標準的な低下」を示した有益なグラフです。

たとえば、300MHzのスコープは、300MHzにおいて最大30%の誤差を生じることになります。誤差を3%未満に維持するためには、測定可能な最大信号帯域幅は約0.3×300MHz、すなわち90MHzになります。別の言い方をすれば、100MHzの信号を正確に(3%未満の誤差で)測定するには、少なくとも300MHzの帯域幅が必要であるということです。図1のグラフは、重要なポイントを示しています。すなわち、振幅誤差を妥当なレベルに抑えるには、スコープとプローブの組み合わせの帯域幅を測定対象の信号の帯域幅の3~5倍以上にする必要があるということです。振幅誤差を1%未満にするには、スコープの帯域幅を信号帯域幅の5倍以上にする必要があります。
デジタル回路の場合、立上がり時間が特に重要な要素になります。スコープが忠実に立上がり時間を再現できるようにするため、予期される(予想される)立上がり時間を使用してスコープの帯域幅要件を決めることができます。この関係は、図2に示すように、回路が単極のローパスRCネットワークと同様に応答するものと想定しています。

印加する電圧のステップに応じて式2を使用することで出力電圧を計算できます。
 |
(2) |
ステップに応答する立上がり時間は、出力がステップ振幅の10%から90%になるまでの時間と定義されます。式2を使用すると、パルスの10%ポイントは0.1RCであり、90%ポイントは2.3RCです。これらの差は2.2RCになります。-3dB帯域幅fは、1(/ 2pRC)に等しく、また、立上がり時間trは2.2RCであるため、
 |
(3) |
このように、単極プローブの応答の場合、立上がり時間がわかれば、式3を使用して、信号の等価帯域幅を解くことができます。たとえば、信号の立上がり時間が2nsの場合、等価帯域幅は175MHzになります。
 |
(4) |
誤差を3%に維持するには、スコープとプローブを組み合わせた帯域幅を測定対象の信号の少なくとも3 倍高速にする必要があります。このため、2ns の立上がり時間を正確に測定するには、600MHzのスコープを使用する必要があります。
プローブの詳細
その簡潔さを考えると、プローブはきわめて優れたデバイスです。プローブはプローブチップ(並列のRCネットワークが含まれます)、1本のシールド線、補正ネットワーク、およびグラウンド・クリップで構成されます。プローブの最も重要な要件は、スコープとプローブ間に非侵入性のインターフェースを築くというものです。これにより、回路への妨害を極力減らすと同時に、スコープによって測定対象の信号をほぼ完全に再現できるようになります。
プローブの起源は、真空管の時代にまで遡ります。グリッドとプレートで測定を行うには、信号ノードの負荷を最小限に抑えるためハイ・インピーダンスを必要としました。この原則は今日でも重要です。ハイ・インピーダンスのプローブは、極端に回路に負荷を加えることがないため、測定ノードで実際に行われている内容を正確に描くことができます。
実験室での著者の経験では、最もよく使われているプローブは、10×と1×のパッシブ・プローブです。次に10×のFETアクティブ・プローブが(パッシブとほとんど差がないぐらいに)よく使われています。10×パッシブ・プローブは、10分の1に信号を減衰します。このプローブの入力インピーダンスは10MWで、標準チップ容量は10pFです。1×のプローブは減衰を行わず、直接信号を測定します。このプローブの入力インピーダンスは1MWで、チップ容量は100pFもの大きな値になります。図3は、10×、10MWプローブの代表的な回路図を示します。

RP(9MW)とCPはプローブチップ内にあり、R1はスコープの入力抵抗で、C1はスコープの入力容量とプローブの補正ボックス内の容量とを結合しています。正確な測定結果を得るには、2つのRC時定数(RP CPとR1C1)が等しくなければなりません。これが不均衡になると、立上がり時間と振幅の両方で誤差を生じるおそれがあります。したがって、測定を行う前に、必ずスコープとプローブを較正することがきわめて重要になります。
較正
スコープとプローブを入手したらまず最初に行うべき作業の1つは、内部のRC時間定数が一致するようにプローブを較正することです。このステップは、不要と見なされて省略されることが多いものです。
図4は、プローブをスコープの補正出力に正しく接続する方法を示しています。較正を実行するには、補正ボックスの調整ねじを非磁性調整ツールで回して、フラットな応答が得られるようにします。

図5は、補正不足、補正過剰、適正補正の各プローブで得られる波形を示してします。
図を見ればわかるように、補正不足と補正過剰のプローブは立上がり時間と振幅の測定に大きな誤差をもたらすおそれがあります。一部のスコープには較正機能が内蔵されています。お使いのスコープに較正機能があれば、測定前に必ず較正を実行してください。



グラウンド・クリップと高速測定
本来備わっている寄生インダクタンスのため、グラウンド・クリップと実際の高速測定は互いに矛盾するものとなります。図6は、グラウンド・クリップの付いたスコープ・プローブの簡略回路図を示しています。プローブのLC結合により直列共振回路が形成されます。この共振回路が発振器の基本構成です。

このようなインダクタンスが付加されることは望ましくない特性です。なぜなら直列のLC結合は、正常な波形に大きなオーバーシュートとリンギングを加えることになるからです。このリンギングとオーバーシュートは、スコープの帯域幅が限定されているため、ほとんどの場合、気付かれることがありません。たとえば、200MHzの発振を含んだ信号を100MHzのスコープで測定する場合、リンギングは見られません。また、帯域幅が限定されているため、この信号は大幅に減衰されます。100MHzスコープの場合、図1で示したように、100MHzで3dBの減衰を生じ、また、1オクターブ当たり6dBが連続して減衰します。このため、200MHzの寄生リンギングはほぼ9dB低下し、元の振幅のほとんど35%まで減少することになるため、確認が難しくなります。
しかし、高速測定で広帯域スコープの場合は、グラウンド・クリップの影響が明確に現れますグラウンド・クリップによってもたらされるリンギングの周波数は、式5を使用してグラウンド・クリップの直列インダクタンスを計算することで概算できます。Lはインダクタンス(ナノヘンリー)、lは線長(インチ)、dは線径(インチ)です。
 |
(5) |
式5の結果を式6に代入することで、共振周波数f(Hz)を計算できます。Lはグラウンド・クリップのインダクタンス(ヘンリー)で、Cはプローブを当てるノードにおける総容量(ファラッド)です(プローブの容量にあらゆる寄生容量を加えたもの)。
 |
(6) |
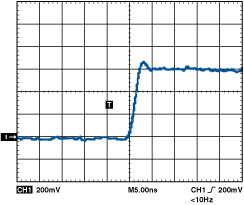
長さの異なるグラウンド・クリップを用いた例をいくつか見てみましょう。最初の例では、11pFのプローブと6.5インチのグラウンド・クリップを使用して高速な立上がりパルスのエッジを測定しています。結果を図7に示します。一見したところ、パルス応答はきれいに見えますが、詳細に調べてみると、きわめてレベルの低い100MHzの減衰振動が見られます。

式5と6に物理的な特性を代入して、この100MHzの発振がグラウンド・リードによるものかどうかを確認してみましょう。グラウンド・クリップの長さは6.5インチで、線径は0.03インチです。これにより、190nHのインダクタンスが生じます。この値を、C=13pF(スコープ・プローブによる11pFと浮遊容量の2pF)とともに式6に代入すると、約101MHzが得られます。観察結果の周波数との相関関係が良好なことから、6.5インチのグラウンド・クリップが低レベル発振の原因であると断定できます。
ここで、より極端な事例、すなわち立上がり時間が2nsのより高速な信号が印加される場合を考えてみましょう。これは一般的に、高速PCボードでよく見られる事例です。TDS2000シリーズのスコープを使用すると、図8aに示すように、著しいオーバーシュートと長時間にわたるリンギングが生じます。この理由は、2nsという高速な立上がり時間(帯域幅が175MHzに相当)が、プローブ・リードの直列LCを100MHzでリンギングさせるだけのエネルギーを十分に超えるからです。オーバーシュートとリンギングは、ピークtoピークでおよそ50%です。標準的なグラウンドによって生じるこのような結果は明確に視認できるものであり、高速測定ではまったく受け入れることはできません。
グラウンド・リードを排除すれば、印加された入力信号に対する応答は非常にに優れた忠実度を示します(図8b)

2nsのステップに対する応答
b)グラウンド・リードを用いないステップ応答
高速測定のためのプローブの準備
意味のあるスコープ・プロットを得るためには、回路からグラウンド・クリップを取り外して、プローブを分解する必要があります。完璧なプローブでもない限り、これが正しい処置になります。まず最初に排除するものは、プレスオン・プローブチップ・アダプタです。次に、プローブチップを覆うプラスチック・スリーブを回して取り外し、最後にグラウンド・クリップを取り外します。




c)改造前のプローブを用いた測定 d)高速対応のプローブを用いた測定



図9は、プローブ・スコープの改造前(a)と改造後(b)を示しています。図9の(c)は、6インチのグラウンド・クリップを使用してパルス発生器の立上がりエッジを測定したものです。(d)は、(b)に示す高速測定用に構成したプローブを用いて同じ部分を測定したものです。図8と同様、結果にきわめて大きな差が見られます。次に、不要部分を取り外した簡易プローブを較正する必要があります(図4を参照)。較正が完了すれば、いつでもプローブを使用できるようになります。単純にテスト・ポイントに接続して、プローブの外部金属シールドの局所グラウンドを利用するだけです。コツは、スコープ・プローブのシールドのすぐ横のグラウンド接続を利用することです。これにより、プローブに付属のグラウンド・クリップを使用して生じる直列インダクタンスをすべて排除することができます。図10aは、簡素化したプローブを使用する場合の適切なプロービング方法を示しています。簡単にグラウンドを接触させることができない場合は、金属ピンセット、小さなねじ回し、またはペーパー・クリップを利用してグラウンド接続を確保してください(図10bを参照)。図10cに示すように、1本のバスワイヤをチップのまわりに巻き付けることで使い易さが少し向上し、また複数ポイントへのプロービングが(小さな領域内で)可能となります。
さらに、可能であれば、専用の高周波テスト・ポイントをボード上に設計することが望まれます(図11)。このようなプローブチップ・アダプタを使えば、むき出しのプローブチップを使用した場合の上記のすべての利点が得られ、数多くのポイントをすばやく正確に測定できるようになります。

プローブ容量の影響
プローブ容量は、立上がり時間と振幅の測定に影響します。また、特定のデバイスの安定性にも影響するおそれがあります。
プローブ容量は、プロービング対象のノードの容量にそのまま加算されます。加算された容量によってノードの時間定数が増大するため、パルスの立上がりと立ち下がりのエッジが遅くなります。たとえば、パルス発生器が、図12に示すようにある不定の容量性負荷に接続されている場合(CL=C1)、これにともなう立上がり時間は式7で計算できます。RS(=図12のR1)はソース抵抗です。
 |
(7) |

RS=50VでCL=20pFの場合、tr=2.2nsになります。
次に、10pFの10×プローブを用いて同じ回路を検討してみましょう。この新しい回路を図13に示します。総容量は31pFになり、新しい立上がり時間は3.4nsです。立上がり時間は54%以上も増大しています。確かにこれは許容できる値ではありませんが、他に選択肢はあるのでしょうか?

アクティブ・プローブは、高速回路のプロービングのもう一つの適切な選択肢です。アクティブ(またはFET)プローブには、信号を増幅するアクティブ・トランジスタ(通常はFET)が含まれており、信号が減衰するパッシブ・プローブとはこの点が異なります。アクティブ・プローブの利点は、きわめて広い帯域幅、高入力インピーダンス、および低入力容量です。他に、減衰係数の大きなスコープ・プローブを使用する方法もあります。一般に、減衰係数の大きなプローブほど容量は小さくなります。
プローブチップの容量は、立上がり時間の測定で誤差を生じるおそれがあるだけでなく、特定の回路でリンギングやオーバーシュートを生じ、また極端な場合は回路が不安定になるおそれがあります。たとえば、多くの高速オペアンプは、出力と反転入力における容量性負荷の影響を受けやすくなっています。
容量(この場合は、スコープのプローブチップ)が高速アンプの出力端に取り込まれると、アンプの出力抵抗と容量により、フィードバック応答にさらに極が形成されます。この極によって位相偏移が生じ、アンプの位相マージンが低下するため、不安定な状態を引き起こす場合があります。さらに、この位相マージンの損失が、リンギング、オーバーシュート、発振の原因となるおそれがあります。図14は、適切な高速接地の手法を使用し、Tektronix P61131 10pF 10×のスコープ・プローブでプロービングを行った高速アンプの出力を示しています。信号は、1300mVのオーバーシュートを示し、12nsのリンギングが持続しています。明らかに、このプローブはこの用途に適したプローブとは言えません。

幸い、この問題についてはいくつかの解決策があります。第1の手法は、低容量のプローブを使用するというものです。図15では、1.7pFの、Tektronix P6204 1.1GHz 10×アクティブFETプローブを用いて、図14と同じ測定を行っています(この場合も適切な高速接地を実施)。

この場合、低容量のアクティブ・プローブを使用したことで、オーバーシュート(600mV)とリンギング(5ns)は大幅に低下しています。
第2の手法は、少量の直列抵抗(通常25~50W)をスコープ・プローブに挿入するというものです。これによって、アンプの出力から容量が分離し、リンギングとオーバーシュートを低減することができます。
伝搬遅延
伝搬遅延を簡単に測定するには、被試験デバイス(DUT)の入力端と出力端を同時にプロービングします。伝搬遅延は、2つの波形の時間差としてスコープ・ディスプレイから容易に読み取ることができます。
ただし、短い伝搬遅延(<10ns)を測定する際は注意が必要で、両方のスコープ・プローブの長さを同じにする必要があります。ワイヤ内の伝搬遅延は約1.5ns /フィートあるため、長さの異なるペアのプローブによって、相当な大きさの誤差が生じるおそれがあります。たとえば、3フィートのプローブと6フィートのプローブを使用して信号の伝搬遅延を測定した場合、約4.5nsの遅延誤差となります。これは、1~2桁のナノセカンドの測定を行う場合に大きな誤差となります。
長さの等しい2つのプローブが入手できない場合(よくあることです)、以下を実行してください。すなわち、両方のプローブを共通の信号源(たとえばパルス発生器)に接続し、伝搬遅延の差を記録します。これが「較正係数」となります。次にこの数値を、長い方のプローブの読み取り値から減算することで測定値を補正します。
結論
高速テストはそれほど複雑なものではありませんが、実験室で高速時間領域の測定を実施する際は数多くの要因を考慮する必要があります。帯域幅、較正、立上がり時間測定時のスコープとプローブの選択、プローブチップとグラウンド・リードの長さなど、すべてが測定の品質と完全性において重要な役割を担うことになります。ここに記述したいくつかの手法を利用すれば、測定プロセスのスピードアップと、結果の全体的な品質の向上に役立ちます。詳細については、www.analog.com/jpおよびwww.tek.comを参照してください。
参考資料
1 「ABC’s of Probes Primer 」Tektronix, Inc、 2005年
2 Christoph MittermayerおよびAndreas Steininger著「On the Determination of Dynamic Errors for Rise-Time Measurement with an Oscilloscope」IEEE Transactions on Instrumentation and Measurement、48-6、1999年12月
3 Jacob MillmanおよびHerbert Taub著「Pulse, Digital, and Swi tching Waveforms」McGraw-Hi l l、1965 年、ISBN 07-042386-5
4 「The Effect of Probe Input Capacitance on Measurement Accuracy 」Tektronix, Inc、 1996年
謝辞
図1、6、7、8、11、12、13は、Tektronix, Inc.のご厚意により、許可を得て掲載しています。
