要約
このインダストリアルモータ制御システムの概要は、DCモータ、ブラシレスDCモータ、およびAC誘導モータの相違点とサブシステムについて注目します。重要なサブシステムの徹底した分析では、電流の監視と測定、温度検出、モータ速度・位置・動作の検出、マルチチャネルの電流・電圧の監視と制御、およびエンコーダデータインタフェースを用いた高精度のモータ制御に焦点を置きます。
電気モータは世界の電気のおよそ50%を消費しています。エネルギー費は着実に上昇しているため、効率の悪い定速のモータやドライブをマイクロプロセッサベースの可変速ドライブに代えることが、インダストリアル分野で重点的に取り組まれています。この新しいモータ制御技術によって、旧式のドライブに比べて、エネルギー消費量を30%以上削減することができます。これらの可変速コントローラによってモータのコストが増大しますが、予測される省エネとモータ機能の向上によって、数年以内にこの初期経費を容易に相殺することができます。

一般的なモータ設計
DCモータ、ブラシレスDC、およびAC誘導モータは、今日のインダストリアルのアプリケーションで使用される一般的なモータ設計です。これらの各モータタイプは、それぞれに独自の特性を備えていますが、同じ電磁石の基本原理に基づいて動作します。すなわち、電流を流したワイヤ巻線などの導体を、この導体に垂直な外部磁界に置くと、導体は、導体自身と外部磁界の両方に垂直な力を受けるということです。
DCモータ:低コストで正確な駆動性能
DCモータは、実用化された最初のモータタイプの1つですが、初期コストの低さや優れた駆動性能を求められる場合に今もよく使用されています。最も簡単な形態のものでは、ステータ(すなわち、モータの固定の部分)が永久磁石であり、ロータ(すなわち、モータの回転部分)にアーマチュア巻線が施されており、アーマチュア巻線は、巻線に流れる電流のオン/オフを切り替える機械的整流子に接続されています。磁石によって界磁磁束が発生し、これがアーマチュアの電流と相互作用することで電磁トルクが生成されます。これによってモータを作動させることができます。モータの速度を制御するには、アーマチュア巻線に印加されているDC電圧を調整します。
アプリケーションに応じて、フルブリッジ、ハーフブリッジ、または単なるステップダウンコンバータのいずれかを使用してアーマチュア巻線を駆動します。これらのコンバータ内のスイッチをパルス幅変調(PWM)して所望の電圧を得ます。MAX15024/MAX15025などのマキシムのハイサイドまたはブリッジドライバのICを使用すれば、フルブリッジ回路またはハーフブリッジ回路でFETを駆動することができます。
また、DCモータは速度と精度が重要であるサーボアプリケーションに広く使用されています。速度と精度の要件を満たすには、マイクロプロセッサを用いた閉ループ制御と、ロータ位置についての情報が必要不可欠です。マキシムのMAX9641ホール効果センサーを使うことで、ロータ位置に関する情報を得ることができます。
図2。標準的な産業用モータ制御のブロック図。マキシムが推奨するモータ駆動ソリューションの一覧については、analog.com/power-controlをご覧ください。
AC誘導モータ:単純さと耐久性
単純で耐久性があるため、インダストリアル分野ではAC誘導モータがよく使用されています。最も簡単な形態のものでは、このモータは変圧器であり、AC電圧源に接続された1次側電圧と、誘導2次電流を流すために短絡された2次側を備えています。「誘導」というモータの名前は、この誘導2次電流に基づいたものです。ステータには3相の巻線が施されており、ロータの設計が簡単であるため、一般的に「かご形」と呼ばれます。ここでは、鋳造アルミニウムの端部リングによって銅やアルミニウムのバーを両端において短絡しています。ロータの巻線とブラシがないということで、このモータ設計の信頼性は著しく向上しています。
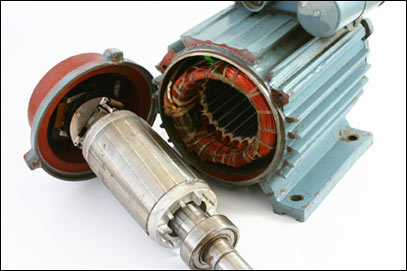
図3。誘導モータのロータとステータ。
誘導モータは、60Hzの電圧で駆動すると一定の速度で動作します。ただし、パワーエレクトロニクスとマイクロプロセッサベースのシステムを使用しているときには、モータの速度を変えることができます。可変速ドライブはインバータ、信号コンディショナ、およびマイクロプロセッサベースのコントロールで構成されます。インバータは、上下のスイッチが補完的に制御される3つのハーフブリッジを使用しています。マキシムには、上下のFETを独立して制御するMAX15024/MAX15025などのハーフブリッジドライバが複数用意されています。
誘導モータの閉ループ制御を効率的に行うには、三相モータの電流、ロータ位置、およびロータ速度を精密に測定する必要があります。マキシムには、これらのパラメータを過酷な環境において正確に測定するための、多数のハイサイドとローサイドの電流アンプ、ホール効果センサー、および同時サンプリングのアナログ-ディジタルコンバータ(ADC)が用意されています。
マイクロプロセッサは、電流と位置に関するデータを使用して三相ブリッジ用のロジック信号を生成します。ベクトル制御と呼ばれる一般的な閉ループ制御技術が、独立して制御可能なようにステータ磁束から界磁電流ベクトルを切り離して過渡応答を高速化しています。
ブラシレスDCモータ:高信頼性および高出力電力
ブラシレスDC (BLDC)モータには整流子もブラシもないため、DCモータよりも保守が少なくてすみます。また、誘導モータやDCモータに比べて1フレームサイズあたりの出力電力が多くなります。
BLDCモータのステータは誘導モータのステータと非常によく似ています。ただし、BLDCモータのロータは、さまざまな形態をとることはあっても、すべてが永久磁石です。磁石によって空隙磁束が固定されており、ステータ電流の影響を受けません。また、BLDCモータの場合、何らかの方法でロータの位置を検出する必要があります。通常はステータに埋め込まれたホール効果デバイスを使用してロータの位置を検出します。ロータの磁極がホール効果センサーの近くを通過すると、N極またはS極が通過したかどうかを示す信号が発信されます。などの、2つのホール効果センサーとディジタルロジックを内蔵し、磁石の位置と方向の両出力を提供することによって、設計を簡素化してシステムコストを削減する、数種類のホール効果センサーを用意しています。
センサー、信号変換、およびデータインタフェースの重要性
センサーの中には、モータ制御ループでフィードバック情報を提供するタイプもあります。これらのセンサーは、モータに損傷を与えるおそれのある障害状態を検出することで信頼性を向上しています。次の項ではモータ制御におけるセンサーの役割を取り上げて詳しく説明します。また電流検出アンプ、ホール効果センサー、および可変磁気抵抗(VR)センサーについて具体的な注意事項について記載します。その他の重要な事項としては、高速アナログ-ディジタル信号変換(ADC)を用いたマルチチャネルの電流と電圧の監視と制御、および高精度のモータ制御に必要なエンコーダデータインタフェースがあります。
最適なモータ制御のための電流の監視と測定
電流監視
電流は、検出、監視、モータ制御ループへのフィードバックを行うための共通の信号です。電流検出アンプによってシステムに対して入力または出力される電流を高精度かつ簡単に監視することができます。電流検出アンプを使用した場合、電気信号そのものが測定されるため、トランスデューサは必要ありません。電流検出アンプによって、短絡と過渡現象の検出および電力と電池の逆接続状況の監視をすることができます。
電流測定
電流を測定するにはさまざまな手法がありますが、最もよく知られた手法は電流検出抵抗器を用いる手法です。この手法では、最初に電流検出抵抗器の両端の電圧降下が差動利得段に設けられたオペアンプによって増幅され、次に測定されます。この手法は従来、ディスクリート部品を用いて実装されていました。しかし、ディスクリートのソリューションは、値が一致した抵抗器、低ドリフト、およびより広い実装面積の各要件など、いくつかの短所も伴います。幸いにも、これらの多くのさまざまな短所は、電流検出アンプを設計に組み込むことによって克服することができます。アンプは電流を測定するだけでなく、電流の方向を検出し、広いコモンモードレンジに対応し、さらにより精密な測定を行うことができます。
電流測定を行うには、グランド経路と直列に検出抵抗器を接続するローサイド方式、またはホットワイヤと直列に検出抵抗器を接続するハイサイド方式のいずれかを利用します。ローサイド測定では、回路は低入力コモンモード電圧に対応し、出力電圧はグランド基準です。ローサイド抵抗器によって、望ましくない不要な電気抵抗がグランド経路に加わります。ハイサイド測定では、負荷は接地されていますが、ハイサイド抵抗器は比較的大きなコモンモード信号に対処する必要があります。また、ハイサイド検出では、グランドに短絡されているモータケースや巻線などの障害状態を検出することもできます。

MAX4080/MAX4081などのハイサイド電流検出アンプは、電源の正端子と監視対象回路の電源入力との間に配置された電流検出抵抗器を使用します。この配置によってグランドプレーン内の不要な電気抵抗を避け、レイアウトを大幅に簡素化し、回路全体の性能を一様に向上しています。MAX9918/MAX9919/MAX9920などのマキシムの片方向/双方向の電流検出ICは、検出抵抗を内蔵するタイプと内蔵しないタイプで提供されています。製品の種類が豊富であるため、設計の柔軟性が大幅に向上し、多種多様なADCとアプリケーションのための部品の選択が簡素化されます。
モータの速度、位置、および動作の検出
ホール効果センサーは、モータの速度、位置、および方向を検出するために使用します。センサーは、デバイスロジックを内蔵しており、リアルタイムにフィードバックを行うためにシステムにこのデータを送出します。また、センサーは、是正措置をとれるように、あらゆるモータの障害を検出して通知します。一般に、動きの方向を検出するには、2つのホール効果センサーを使用します。
システムがモータの位相と同じ数のホール効果デバイスを備え、ホール効果デバイスの機械的な形態とモータの位相の電気的な形態に相関性がある場合、通信をホールのエッジと同期させることができます。マキシムのMAX9641は2つのホール効果センサーとセンサー信号調整を組み合わせて、位置と方向の両方を出力しています。
また、ホール効果センサーはMAX9621などの特殊なホール効果センサインタフェース製品とともに使用することができます。インタフェースデバイスには、電源の過渡事象からの保護、ホール効果センサーが引き込む電流の検出とフィルタリング、障害の診断と保護といったいくつかの機能が用意されています。
ほこりや湿気の多い環境にさらされる機械的なフォトインタラプタベースのシステムに比べてホール効果センサーは堅牢性と再現性を向上させることができます。ホール効果センサーは、磁石または電流によって生成された磁界を検出するため、このような過酷な環境状態でも連続的に動作させることができます。
アプリケーションによっては、振動、ほこり、および高温によって稼動中のセンサーが不適切に動作する場合があります。このような状況では、受動素子を使用してモータの動作を検出し、そのデータをインタフェースICでシステムに送出することができます。あるいは、可変磁気抵抗(VR)センサーをこれらの過酷な動作条件で使用することができます。
MAX9924~MAX9927などのVRセンサインタフェースでは、モータの速度と回転を検出するためのコイルが使用されます。モータに取り付けられたシャフトの歯車が磁石の面を通過すると、磁石、および結果としてコイルを貫通する磁束量が変化します。歯がセンサーに近づくと磁束は最大となり、離れると磁束は低下します。歯車が回転することによって、時間変化する磁束が生成され、これに比例した電圧がコイルに誘起されます。後に続く電子回路でこの信号を処理することでディジタル波形が得られ、より簡便にカウントしたり時間を測定したりすることができます。内蔵のVRセンサインタフェースソリューションは、ノイズ耐性の強化や位相情報の正確さなどを含む、他のソリューションに優る多くの利点を備えています。

マルチチャネルの電流と電圧の監視および制御
モータの監視と制御を行うには、複数の電流と電圧を測定し、チャネル間の位相の整合性を確保する必要があります。設計者は、ADCアーキテクチャについて2つの選択肢から選択することになります。1つ目は、複数のシングルチャネルADCを並列にして使用するもので、変換タイミングの同期が非常に難しい設計です。2つ目は、同時サンプリングADCを使用するものです。同時サンプリングアーキテクチャは、1つのパッケージ中の複数のADCを使用してすべて単一の変換トリガを使用する、あるいはアナログ入力に対して複数のサンプルアンドホールドアンプ(トラックアンドホールドアンプとも呼ばれる)を使用します。複数のサンプルアンドホールドアンプの場合には、複数のアナログ入力と単一のADCの間に依然としてマルチプレクサが使用されています。同時サンプリングによって複雑なディジタル信号処理アルゴリズムが不要となります。
モータ制御アプリケーションの一般的なサンプリング速度は100ksps以上です。ADCはこれらの速度でモータを継続的に監視し、誤りや故障のおそれがないかどうかを確認します。異常の兆候が最初に見つかった時点で、システムは自己補正するか、または必要に応じてシャットダウンすることができます。ADCが十分な速度でサンプリングを行わない場合、エラー状況を早期に特定することができないため、これに対処することができないことがあります。
測定のダイナミックレンジの値は、各モータ制御アプリケーションによって異なります。場合によっては12ビットの分解能で十分ですが、より精密なモータ制御アプリケーションでは、16ビットの分解能がより一般的な基準です。MAX11044またはMAX11049などの高性能16ビットADCは、システムが90dB以上のダイナミックレンジを達成することを可能にします。
マキシムは、モータ制御用に設計された同時サンプリングADCの広範な製品を提供しています。これらのデバイスは、シリアルとパラレルの両インタフェース、および12、14、または16ビットの各動作を備えています。

エンコーダデータインタフェースを用いた高精度のモータ制御
モータ制御に必要な精度はシステム要件に依存します。産業用ロボットや瓶詰めなど、アプリケーションによっては、精度の要件は極めて高くなります。たとえば、溶接ロボットは高速かつ高精度に動作することが求められます。同様に、充填、ふた付け、およびラベル貼りのために瓶を正しい位置で停止させなければならないため、瓶詰工場のモータは正確に制御する必要があります。モータを正確に制御するためには、ロータの速度、方向、および位置を求める必要があります。これらは、レゾルバ、シンクロ、RVDT、または回転式ポテンショメータなどのアナログセンサーを使用して監視することができます。高精度を達成するには、光学エンコーダやホール効果センサーなどのエンコーダを使用します。エンコーダはシャフト角度の増分情報や絶対位置情報をコントローラに提供します。
通常、ディジタル信号プロセッサ(DSP)によってアルゴリズムとして実装されたモータコントローラが、ロータの現在の速度と角度を計算して動作電力段を調整することで、所望の最適な応答を効率的に得ることができます。このフィードバック制御ループにはセンサーからの堅牢で信頼性のある情報が必要です。情報は通常、長いケーブルを介してエンコーダからコントローラへ送出されます。
増分情報は通常、直交信号すなわち位相が90°ずれた2つの信号によってコントローラに伝送されます。これらの信号はアナログ形式(サイン + コサイン)の場合もあれば、バイナリ形式の場合もあります。一方、絶対位置の情報は、シリアル化されたバイナリデータストリームのみがRS-482またはRS-422を通じて送出されます。
作業環境は過酷であるため、データ経路は堅牢性と信頼性が必要です。EMIレベルが高いということは差動信号方式を使用するということです。モータに接近するため、通常、高温にさらされることになります。
マキシムの広範囲にわたるRS-485/RS-422とPROFIBUSのインタフェースデバイスは、これらのモータ制御アプリケーションを対象としたものです。高速RS-485トランシーバのMAX14840Eなどのインタフェースデバイスは、厳格な安全管理や多額の設備投資から成るアップタイムの維持に求められる信号の高い整合性と堅牢性を備えています。

この記事に関して
製品
差動入力、適応型ピークスレッショルドを備えた、可変磁気抵抗センサインタフェース
アナログおよびデジタル出力、デュアル、2線式ホール効果センサインタフェース
差動入力、適応型ピークスレッショルドを備えた、可変磁気抵抗センサインタフェース
-20V~+75V入力範囲、高精度片/双方向、電流検出アンプ
-20V~+75V入力範囲、高精度片/双方向、電流検出アンプ
-20V~+75V入力範囲、高精度片/双方向、電流検出アンプ
低電力、デュアル、ホール効果センサ
4/6/8チャネル、16/14ビット、同時サンプリングADC
4/6/8チャネル、16/14ビット、同時サンプリングADC
シリアルインタフェース内蔵、デュアル、12ビット、1.25Msps、同時サンプリングADC
シリアルインタフェース内蔵、デュアル、12ビット、1.25Msps、同時サンプリングADC
4/6/8チャネル、16/14ビット、同時サンプリングADC
4/6/8チャネル、16/14ビット、同時サンプリングADC
シリアルインタフェース内蔵、デュアル、12ビット、1.25Msps、同時サンプリングADC
4/6/8チャネル、16/14ビット、同時サンプリングADC
4/6/8チャネル、16/14ビット、同時サンプリングADC
±15kV ESD保護、±80V障害保護、フェイルセーフRS-485/J1708トランシーバ
±15kV ESD保護、±80V障害保護、フェイルセーフRS-485/J1708トランシーバ
±15kV ESD保護、±60Vフォルト保護、10Mbps、フェイルセーフRS-485/J1708トランシーバ
±35kV、高ESD PROFIBUS RS-485トランシーバ
40Mbps、+3.3V、RS-485ハーフデュプレックストランシーバ
±15kV ESD保護、±60Vフォルト保護、10Mbps、フェイルセーフRS-485/J1708トランシーバ
±80Vフォルト保護、フェイルセーフ、1/4負荷、+3.3V RS-485トランシーバ
±80Vフォルト保護、フルデュープレックスRS-485トランシーバ
40Mbps、+3.3V、RS-485ハーフデュプレックストランシーバ
差動入力、適応型ピークスレッショルドを備えた、可変磁気抵抗センサインタフェース
差動入力、適応型ピークスレッショルドを備えた、可変磁気抵抗センサインタフェース
{{modalTitle}}
{{modalDescription}}
{{dropdownTitle}}
- {{defaultSelectedText}} {{#each projectNames}}
- {{name}} {{/each}} {{#if newProjectText}}
-
 {{newProjectText}}
{{/if}}
{{newProjectText}}
{{/if}}
{{newProjectTitle}}
{{projectNameErrorText}}
最新メディア 21