AN-922: 数字脉冲整形滤波器基础知识
简介
必须在带宽受限环境中工作的数据传输系统必然面临这样一个问题:限制被传输信号的带宽必然会增大接收机解码错误的几率。带宽受限系统常常采用脉冲整形技术,该技术可以限制带宽,同时最大限度地减少接收机误码率。
数字滤波器问世之前,脉冲整形采用模拟滤波器来实现。但是,模拟滤波器的响应会受元件值变化的影响,这种元件值的变化是由于随额定容差范围、温度和老化程度引起的。与之相比,数字滤波器的响应仅受滤波器系数影响,而这些系数不会随着温度和老化程度而变化。因此,数字脉冲整形滤波器已成为许多数字数据传输系统的一部分。本应用笔记描述了脉冲整形技术的基本原理,以及数字脉冲整形滤波器设计中需要权衡的一些问题。
矩形脉冲
数字传输中,最基本的信息单元是矩形脉冲。它具有确定的幅度A和确定的持续时间T。图1给出了这样一个脉冲,其中A = 1, T = To,脉冲的中心点为时间原点t = 0。通常来说,一系列这种脉冲(每个脉冲相对于前一个脉冲延迟了T 秒)构成了信息传输。这种情况下,信息被编码为脉冲幅度。最简单的情况是,二进制0被编码为无脉冲(A= 0),二进制1被编码为有脉冲(A=常数)。由于每个脉冲的持续跨度为周期T,则最大脉冲速率为每秒1 / T脉冲,那么数据传输速率为每秒1 / T位。


在更为复杂的数据传输方案中,脉冲幅度可以取正值和负值,多个离散幅度用于将多于1位的信息进行脉冲编码。例如,四个电平可以用来对两位信息进行编码,其中每个电平分别对应四种可能的位组合模式之一。某些情况下,多个脉冲同时传输,这样可以对更多位的信息进行编码(参考“多位码元编码”一节)。
在复杂的传输系统中,具有多种幅度和/或多个同时发出的脉冲传输单个数据单元。于是,每个数据单元可以表示1位以上的信息。单个数据单元表示的一组数据位被称为一个码元。当然,简单情况为图1所示的单个双极脉冲,其中每个数据单元就是单个数据位(该情况中,码元和位是同义的)。
用来传输码元的脉冲占据一段固定的时间间隔T(如图1)。因此,脉冲速率为每秒1 / T脉冲,即码元速率为每秒1/T码元。单位(码元/秒)常称为波特。数据传输速率,以位/秒表示,等于波特率乘以每个码元所表示的位数。例如,如果一个码元代表了四位,则比特率是码元速率的四倍。也就是说,与直接传输数据位相比,可以采用较低的传输速率传输码元,这正是更复杂的数据传输系统将位组合编码成码元的主要原因。本应用笔记后面将讨论如何用单个双极脉冲在每一时刻传输1位信息。也就是说,逻辑1由单位幅度的有脉冲表示,逻辑0由无脉冲(即零幅度)表示。当然,本应用笔记所讨论的概念可用于更复杂的编码方案。
矩形脉冲的频谱
图2给出了图1所示脉冲的频率组成(或频谱)。脉冲的频谱可通过图1的时域波形进行傅立叶变换来获得。频谱形状为众所周知的sin(x)/ x响应,通常称为sinc响应。零点(频谱幅度为0)总是出现在脉冲(或码元)速率fO的整数倍的地方。因此,零点仅由脉冲周期T确定。理论上,各零值和各峰值在频率上可扩展至±∞,随着频率的扩展,各峰值逐渐降低而而接近零幅度。不过,由于图2的频率跨度仅为 ±4 fO,所以在f = 0线的两侧各只有4个零点。


不管矩形脉冲的幅度多大,图2出现的频谱形状都是一样的。峰值幅度与矩形脉冲的幅度呈正比,但矩形脉冲的幅度对零点的频率位置无影响。因此,尽管各个脉冲的幅度互不相同,基于脉冲幅度变化的编码方案仍然生成类似于图2的频谱。
升余弦滤波器
如图2所示,矩形脉冲的频谱扩展至无限大的频率上。在许多数据传输应用中,所传输的信号必须限制在一定的带宽内。这可能是由于系统设计方面的局限或政府法规所限。在这种情况下,矩形脉冲的无限大的带宽是不能接受的。但将矩形脉冲通过低通滤波器后,带宽可以得到限制。经滤波后,脉冲形状从纯粹的矩形变为无陡峭边沿的平滑轮廓线。因此,对矩形数据脉冲进行滤波的操作常常被称为脉冲整形。
不幸的是,限制矩形脉冲的带宽必然会带来阻尼振荡。也就是说,矩形脉冲仅在脉冲间隔处呈现非零的幅度,而经过平滑处理(或滤波)后,在脉冲间隔处的前后都会出现纹波。在接收机处,纹波能导致错误的数据解码,因为脉冲附带的纹波会干扰其前后的脉冲。但选择适当的滤波器,不仅能够如期望的那样减少带宽,而且能保证时域波形不会干扰接收机的解码过程。
这种滤波器就是著名的升余弦滤波器,其频率响应由下列公式给出
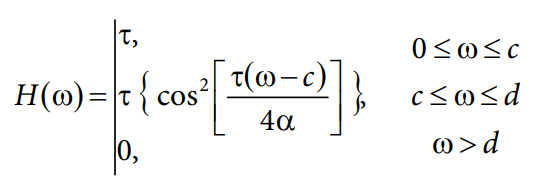
其中:
ω为角频率(2πf)。
τ 为脉冲周期(等于图1中的TO)。
α 为滚降系数。
c等于π (1−α)/τ。
d等于π(1 +α)/τ。
图3显示了升余弦频率响应的特性(归一化至τ=1)。升余弦滤波器得名于其频率响应曲线,而非脉冲(或时域)响应曲线。


升余弦滤波器的响应特性可通过滚降系数进行调节,该系数由α表示,0≤α≤1。
当α=0时,频率响应被限于½ fO (绿色曲线)。
当α= 1时,频率响应被限于 fO(蓝色曲线)。
当α值介于0和1之间时,频率响应被限于½ fO和fO之间(红色曲线表示α=½时的响应)。
黑色虚线为矩形脉冲的频谱,以便于比较。
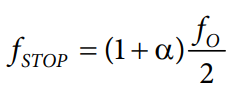
升余弦响应有三个重要的频率点。第一个称为奈奎斯特频率,位于½ fO(即½脉冲速率)处。根据通信理论,奈奎斯特频率是无信息损失前提下传输数据时可采用的最小可能带宽。请注意,不管α值多大,升余弦响应的½幅度点都会通过½fo处。第二个重要的频率点为阻带频率(fSTOP),它被定义为响应首次达到零幅度时的频率点。与α的关系为:
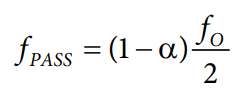
第三个,也是最后一个重要的频率点为通带频率(fPASS),它被定义为响应开始偏离峰值幅度时的频率。升余弦响应 在从f = 0 (DC)到fPASS保持平坦,其中:
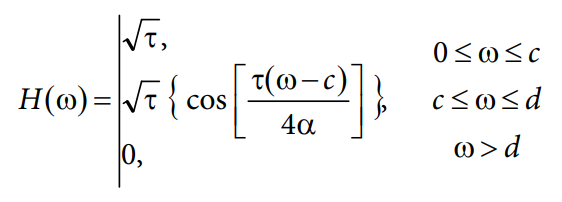
有时,大家希望升余弦响应为两个相同响应的乘积,一个响应在发射端实现,另一个在接收端实现。在这种情况下,响应变为方根升余弦响应,因为两个响应的乘积得到所希望的升余弦响应。下面给出了方根升余弦响应。请注意,其中变量的定义与升余弦响应的相同。
脉冲整形
脉冲整形的结果是,初始的时域矩形脉冲失真变为平滑的圆角的脉冲,在±½To点前后带有阻尼振荡(纹波)。纹波是矩形脉冲与升余弦脉冲响应卷积的结果(时域中滤波过程就是卷积)。升余弦滤波器的脉冲响应(时域)如图4所示,其 各颜色代表的含义同图3。即绿色曲线对应α=0时的脉冲响应,红色曲线对应α= ½,蓝色曲线对应α= 1。脉冲响应的振荡是由于将滤器带宽限制在有限范围内的必然结果。然而,升余弦过滤器的美妙之处在于脉冲响应的过零点恰好与相邻脉冲的中点重合。只要接收机在每个脉冲间隔的中点做出判决,则相邻脉冲的纹波在该点恰好过零。因此,它们不会干扰到判决过程。


请注意,α从0增加到1,滤波器的通带随之减小(见图3),而时域纹波的幅度却随之增大(见图4)。因此,α= 0时,带宽的利用率最高,但代价是在时域上出现更多纹波(相对于α> 0)。选择α> 0会造成传输频谱带宽的增加,但时域响应里的纹波幅度会减少,从而弥补了这种负面效应。
升余弦响应是有益的,因为它所产生的时域纹波在相邻脉冲间隔的中点处过零。如果无论α取何值,升余弦脉冲都在相邻脉冲间隔的中点处过零,那么为何仍然要担心纹波幅度大小呢?何不直接选择α= 0得到最小带宽,而接受最大的纹波幅度呢?其原因是接收机往往不能恰好在每个脉冲的中点进行采样。由于纹波只是在相邻脉冲间隔的中点处为零,因此接收机的采样点与脉冲间隔的中点不重合时,必然会采样到相邻脉冲的纹波。
这是接收机处判决的一个误差源,被称为码间干扰(ISI)。带宽减少意味着纹波变大,从而加剧了码间干扰,增加了接收机处出现错误判决(即误码)的可能性。显然,要在频域中的带宽限制和时域中的纹波衰减之间找到折衷点。开发采用脉冲整形技术的数据传输系统时,设计工程师必须考虑带宽限制与纹波幅度间的平衡。
数字脉冲整形滤波器
升余弦滤波器常用数字滤波器而非模拟滤波器来实现。以数字方式实现意味着滤波器会受到奈奎斯特系统的限制。也就是说,滤波器采样速率必须是输入带宽的两倍,才能避免混叠。如果数字脉冲整形滤波器以fO的采样速率(码元速率)工作,则最大输入带宽必须限制为½fO。这就带来了一个问题,因为图3显示,当α> 0时所需的带宽大于½ fO,当α=1可以扩展到fO。这意味着数字脉冲整形滤波器必须对码元脉冲进行至少2倍的过采样,以满足高达fO的带宽要求。
虽然数字滤波器通常会产生所期望的频域响应,但实际是在时域实现滤波的。也就是说,数字滤波器系数(抽头)定义了滤波器的脉冲响应(时域特性),它能产生所需的频率响应。因此,懂得了所需要的脉冲响应而非频率响应,就能大大简化数字滤波器的设计任务。为此,升余弦滤波器的脉冲响应可以由下面的公式来给出。
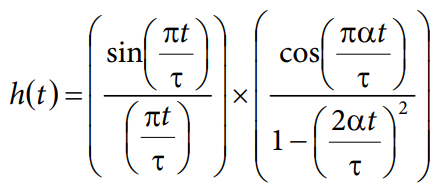
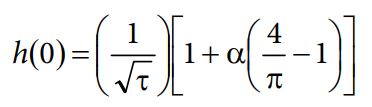
其中,变量的定义同升余弦频率响应的变量定义一致,只是时间变量t取代了频率变量ω。虽然 t = 0时,h(t)无定义,且t = ±τ/(2α)点,h(t)无定义,但可以规定如下:
h(0) = 1
和
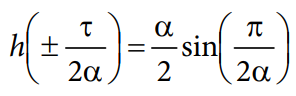
同样,h(t)在t = 0点无定义,但可以规定
同样,h(t)在t = 0点无定义,但可以规定
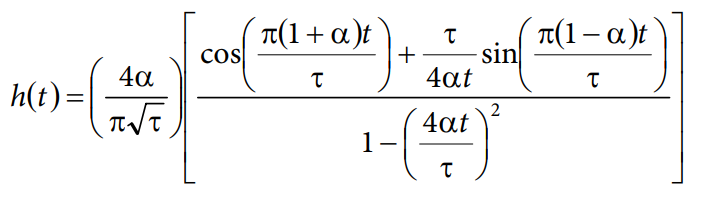
h(t)在t = ±τ/(4α)点也无定义,但没有补救的方法。因此,应避免所设计的方根升余弦滤波器的抽头数符合t = ±τ/(4α)值。
一般来说,数字脉冲整形滤波器是以有限脉冲响应(FIR)滤波器而非无限脉冲响应(IIR)滤波器来实现的,这有几方面的原因。
设计FIR滤波器时可轻松获得线性相位响应,这在必须保证恒定群延迟的应用中极为重要。
- FIR滤波器不受极限环的影响,这是常常困扰IIR设计的问题。极限环是指,即使除去输入信号,滤波器输出端的小振荡仍然存在。
- FIR滤波器本质上是稳定的,因为它们没有反馈。另一方面,IIR架构存在反馈,因此,其系数的选择对稳定性会有影响。事实上,如果不谨慎实际以实现无条件稳 定,IIR滤波器还会振荡。
- 如果滤波器是以硬件形式实现的(而不是软件实现形式),FIR滤波器本身可采用多相架构,从而大大减少了所需的硬件数量。这一点很重要,因为比之具有类似频 率响应特性的FIR滤波器,IIR滤波器通常需要较少的滤波器系数(或抽头数)。由于实现滤波器所需的硬件数直接与抽头数成正比,FIR滤波器所采用的硬件数往往更 多。然而,FIR采用多相技术后硬件数量减少,会削弱IIR在硬件上的优势。
为简明起见,本应用笔记仅考虑采用FIR来实现。然而, 无论选择FIR或IIR数字滤波器,滤波器的响应不过是近似 于理想响应(在此指升余弦)。滤波器响应与理想响应的匹 配程度取决于两个参数:过采样倍数(M)和抽头数(N)。
设计用于脉冲整形的FIR时,一般将N设定为M的整数倍。这可确保滤波器的脉冲响应的宽度是脉冲宽度的整数倍。因此,滤波器抽头数可由下式得出
N = D × M
其中D和M都是整数。
滤波器的阶数为奇或为偶,取决于N是奇数还是偶数。如果已经确定了某个特定的过滤器的阶数,习惯上设N+1为所需要的阶数。请注意,D值决定了滤波器脉冲响应跨越的码元数。一般来说,更大D值表示对理想响应更好的近似。不过,滤波器的复杂性与D成正比,所以要使用满足滤波要求的最小D值。选定最小可接受D值比较困难,尤其是当滤波器设计必须满足大范围内变化的α值时。这是因为滤波器的频率响应受到滚降系数(α)、脉冲响应所跨越的码元数(D)、过采样系数(M)和滤波器阶数(抽头数,为奇或为偶)的影响。
为辅助选定D值,下面几页给出了一些曲面图。这些图针对给定的一组滤波要求提供了选择可用D值的指导。这些图采用基于浮点运算的模拟来生成。因此,这些图不包括量化和/或截断误差,而采用定点设计时必须考虑这些误差。一般来说,量化和截断会降低阻带衰减,这使得具有更高阻带要求的应用对量化和截断的影响比较敏感。
各图中α和D值的范围为0.05≤α≤1和2≤D≤20。这些图分为3大组,分别对应于3个重要的频率点:通带边缘、奈奎斯特频率和阻带。所有图的纵轴都采用分贝为单位。
- 第1组:通带边缘频率, f = ½(1 − α)fO。
第1组绘制了相对于0 dB(或1,即理想升余弦响应在通带边缘处的幅度),通带边缘频率处滤波器响应的误差。 - 第2组:奈奎斯特频率, f = ½ fO (是码元速率的½)。
第2组绘制了相对于−6 dB(或½,即理想升余弦响应奈奎斯特频率处的幅度),奈奎斯特频率处滤波器响应的误差。 - 第3组:阻带, f ≥ ½(1 + α)fO。
第3组绘制了最低阻带衰减,即整个阻带出现的最小衰减值: ½(1 + α)fO ≤ f ≤ ½ MfO。
每一组都由4幅图以2×2的网格形式排列。左侧是偶数阶滤波器,右侧是奇数阶滤波器。上面两幅图是过采样系数为2(m = 2)的情形,下面两幅图是过采样系数为7(m = 7)的情形。为简明起见,只显示了2种过采样系数的情形。这些图只是表明总的趋势,而不是全面的数据。
观察这些图,能发现不同设计参数(M、D和α)之间的关系。
- α越趋近于零,D必须随之大幅度增大,以保持通带、阻带与奈奎斯特频率性能不变。因此,要同时适应α大值和小值的滤波器设计,D值必须足够大,以满足滤波器对最小α值的要求。
- 可接受的最小D值主要由最低阻带衰减的要求所决定。α值越小时,情况尤为如此。例如,当α= 1,D=20时,最小阻带衰减接近于80 dB,α= 0.05时,同样的D值只能产生约20 dB的衰减。
- 除了能降低因D或α稍有变化时阻带衰减出现的变化外,过采样(M)的大小对滤波器性能几乎没什么影响。
- 选用偶数阶还是奇数阶的设计,似乎只是一个学术问题。奇数阶设计在奈奎斯特频率点占有优势,但只限于D和α取较小值的情况下。
第1组图:通带边缘处的误差
图5至图8对应于通带边缘的频率, f = ½(1 − α)fO。








第2组图:奈奎斯特频率点处的误差
图9至图12对应于奈奎斯特频率, f = ½ fO。








第3组图:最小阻带衰减
图13至图16对应于阻带, f ≥ ½(1 + α)fO。








多位码元编码
常用的多位脉冲编码方案是正交幅度调制(QAM)。QAM依靠两个机制对数据位进行编码。一个是脉冲幅度,它可取正值或负值,另一个是同时使用两路脉冲。后者要求采用两个独立的基带通道,每路脉冲一个通道。一个通道是指I路或同相通道,另一个是指Q路或正交通道。
QAM有不同的形式,取决于每一对脉冲所编码的数据位数。例如,16 QAM使用4位码元,代表16个可能的码元值,64 QAM使用6位码元,代表64个可能的码元值;256 QAM使用8位码元,代表256个可能的码元值。一般来说,QAM对偶数位数进行编码(4、6、8等等),QAM也可以对奇数位进行编码,但不常见。
以16 QAM为例,更详细地介绍QAM编码方案。与其他QAM版本一样,16 QAM采用同时使用两路脉冲来对码元进行编码。因此,对于16 QAM,每个脉冲必须能取四个电平,因为每个脉冲具有4个可能电平值时,2个脉冲能获得16种可能的组合。四种可能的脉冲电平是:+1/3 AMAX、 −1/3 AMAX、+AMAX和−AMAX(AMAX指最大脉冲幅度)。16 QAM的I和Q脉冲范例如图17所示(其码元值如表1所示)。


| 码值(二进制) | k | m | Ik | Qm |
| 0000 | 0 | 0 | 1/3 AMAX | 1/3 AMAX |
| 0001 | 0 | 1 | 1/3 AMAX | AMAX |
| 0010 | 0 | 2 | +1/3 AMAX | −1/3 AMAX |
| 0011 | 0 | 3 | +1/3 AMAX | −AMAX |
| 0100 | 1 | 0 | AMAX | 1/3 AMAX |
| 0101 | 1 | 1 | AMAX | AMAX |
| 0110 | 1 | 2 | +AMAX | −1/3 AMAX |
| 0111 | 1 | 3 | +AMAX | −AMAX |
| 1000 | 2 | 0 | −1/3 AMAX | +1/3 AMAX |
| 1001 | 2 | 1 | −1/3 AMAX | +AMAX |
| 1010 | 2 | 2 | −1/3 AMAX | −1/3 AMAX |
| 1011 | 2 | 3 | −1/3 AMAX | −AMAX |
| 1100 | 3 | 0 | −AMAX | +1/3 AMAX |
| 1101 | 3 | 1 | −AMAX | +AMAX |
| 1110 | 3 | 2 | −AMAX | −1/3 AMAX |
| 1111 | 3 | 3 | −AMAX | −AMAX |
图17的纵轴显示的幅值,从最低增加到最高时,采用相等的步进。采用这种方案,同时使用的两路脉冲的电平能确定唯一的4位码元。例如,令I和Q脉冲的幅度由一个坐标对(Ik, Qm)表示,其中下标数值(k和m)的范围是0至3,而幅值(Ik, Qm)则取值±1/3 AMAX或±AMAX。将幅值对与各码元值对应,如表1所示,会得到图18所示的星座图。


参考文献
Gentile, K., 2002, “The Care and Feeding of Digital Pulse-Shaping Filters”, RF Design Magazine (April).
Gibson, J. D., 1993, Principles of Analog and Digital Communications, 2nd Edition, Prentice Hall.
作者
