AN-1367
AN-1367: ADE7953和ADuCM360之间的 I²C 接口
简介
本应用笔记说明了如何使用C语言来实现在 ADE7953(从机)和ADuCM360(主机)之间实现 I2C 接口通信。ADE7953是一个单相电能计量IC,而ADuCM360是一个基于ARM® Cortex®-M3的微控制器。ADE7953包含8位、16位、24位以及32位长的寄存器。编写源代码时,必须确保依据寄存器的地址来识别读/写操作的数据大小。ADE7953数据手册中的寄存器清单包含全部相关信息。
此应用笔记介绍了ARM Cortex-M3内核和ADuCM360微控制器(MCU),接着介绍了需要在ADuCM360中完成的初始化步骤,最后介绍了在ADE7953和ADuCM360之间如何实现I2接口。在此应用笔记中所描述的示例代码也可以用在其他基于ARM Cortex-M内核的ADI处理器中。
用于建立 I2C接口的完整源代码以可下载文件的形(AN_1367_ I2C_interface.zip)提供,网址为www.analog.com/ ADE7953或www.analogcom/ADuCM360。
本应用笔记说明了如何在Visual C++ 2012集成开发环境(IDE)中实现源代码,并为ADE7953和ADuCM360之间的 I2C通讯端口提供了有用的见解。
验证该源代码需用到下列设备和软件:
- ADE7953和ADuCM360评估模板 (EVM)
- 软件的开发环境:Keil MDK-ARM版本 4.72
- 终端模拟器:Tera Term版本4.79
- IDE:Visual C++ 2012
- 笔记本电脑 (PC)
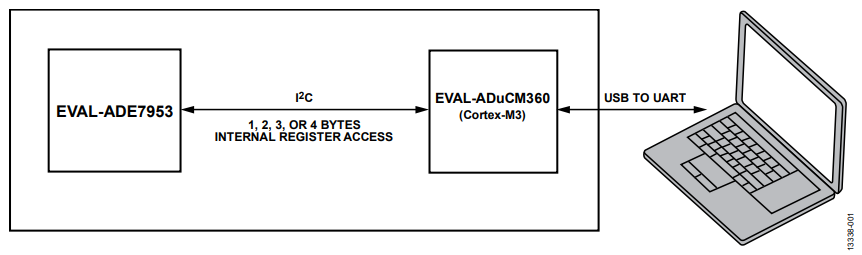
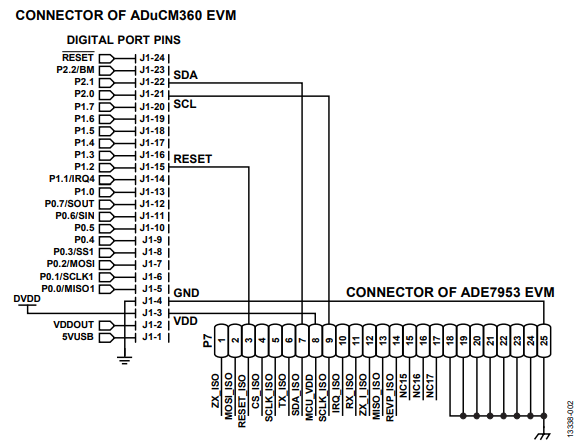
整个实验环境设置如图1所示。两块评估模板以线相连,如图2所示。本设置中未考虑使用隔离接口,因此两块模板都以普通电源供电并共用一根地线。如果要隔离I2接口,则必须考虑隔离器的传播延迟问题。


设置说明
终端模拟器软件Tera Term(版本4.79)被用于通过ADuCM360读取ADE7953寄存器的信息或向其写信息。这一通用的异步接收器/发射器(UART)通信接口被用在ADuCM360和电脑之间,用于发送和接收读/写的命令和数据。Tera Term(版本4.79)软件(包括为基于接口的UART通信完成源代码的示例)可从各种资源免费获取,其中包括OSDN公司。
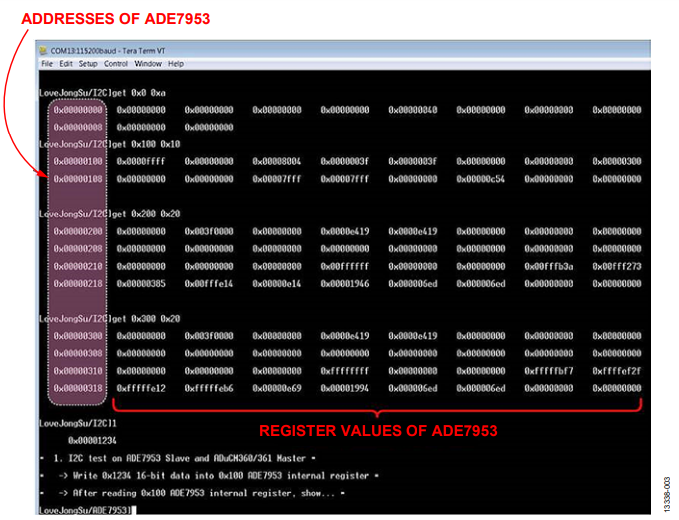
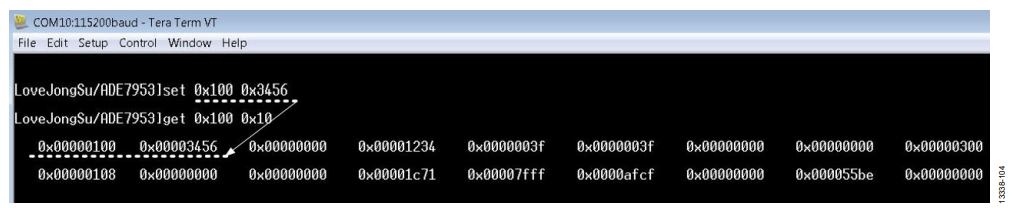
图3显示的是终端窗口,通过此窗口,示例代码的获取和设置命令被用于访问ADE7953寄存器。这两个命令的语法是
- 设置REG_ADDR值设置命令采用特定值对位于REG_ADDR的寄存器进行写入。
- 获取START_REG_ADDR REGISTER_NUMBER 获取命令读取从START_REG_ADDR地址开始、连续REGISTER_NUMBER数量的寄存器内容。待读取寄存器位置的数量由REGISTER_NUMBER决定。
该源代码的独特性在于,即使不知道每个寄存器的数据大小,它也允许电脑与ADE7953通信,这是因为寄存器的查找表已被使用。


ARM CORTEX-M3内核与ADUCM360 MCU
ARM Cortex-M3内核是基于ARMv7-M架构。Cortex-M系列主要用于嵌入市场、所需的内核时钟频率低于300 MHz的应用中。大部分嵌入式应用(例如交流电动机控制和其他简单的家用电器)并不需要如内存管理单元(MMU)和NEON™一类的复杂功能,使Cortex-M系列成为不错的选择。Cortex-M内核的架构要比其他Cortex系列简单。
Cortex-M内核系列包含以下独特功能:
- 固定的存储图谱
- 通用嵌套矢量中断控制器(NVIC)
- 仅支持 umb®-2指令组
为一个Cortex-M系列MCU写的代码易于修改并可用于另一个Cortex-M系列MCU,即使它来自另一家供应商。而且,ARM免费为广泛的应用提供有用的Cortex微控制器软件接口标准(CMSIS)软件。
图5对Cortex-M系列内核的固定存储图谱与ADuCM360的固定存储图谱进行了比较。
如图5所示,ADuCM360包含适用于Cortex-M系列、基于固定存储图谱的8 kB SRAM和128 kB闪存盘/EE存储器。所有ADuCM360外围设备均被映射0x40000000至0x4004FFFF地址范围。0xE000E000 - 0xE000EE000的地址范围适用于Cortex-M内存映射寄存器(MMR);0x40000000 - 0x4004FFFF地址范围适用于ADuCM360 MMR。


注意以下有关NVIC的信息:
- Cortex-M内核系列只有一种核心中断,而较老的ARM内核有快速中断和正常中断两种中断。
- 两组寄存器可用:中断使能寄存器(ISER)和中断除能寄存器(ICER)。
一般来说,如UART和I2C一类的外围设备自身都具有寄存器,可以禁用/启用中断。根据ISER/ICER值,在每台外围设备传输的中断中,只有一种能到达MCU核心。ISER处于0xE000E100 - 0xE000E13C地址范围,ICER处于0xE000E180 -0xE000E1BC地址范围。使用Cortex-M系列MCU时,请按需要更改ISER和ICER。在所有可用的IDE工具中,Keil MDK-ARM和IAR Embedded Workbench®最受欢迎。当可执行文件在指定的代码尺寸限制内时,这两种工具都可使用。Keil MDK-ARM IDE用于设置此应用笔记的实验环境。要在IAR Embedded Workbench IDE中使用来自可下载文件AN_1367_I2C_interface.zip中的代码,则必须更改 ADuCM360StartUp.s 文件。将IDE从Keil MDK-ARM转入IAR Embedded Workbench或从IAR Embedded Workbench转入Keil MDK-ARM时,只需更改汇编指令,无需更改指令组,这是因为汇编指令由汇编器决定,而指令组由MCU内核决定。
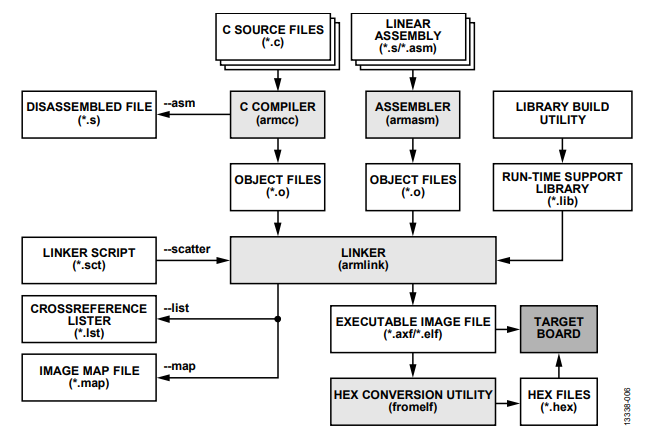
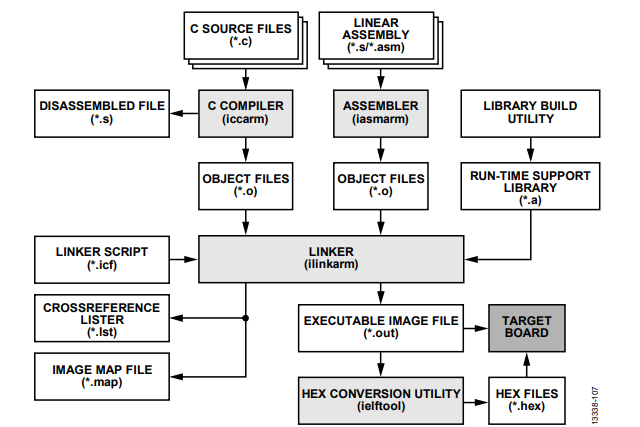
图6和图7分别显示了Keil MDK-ARM和IAR EmbeddedWorkbench IDE各自的工具链。在图6中,以灰色阴影显示armcc、armasm和armlink,表示它们分别构成C/C++编译器、汇编器和链接器。在图7中,同样以灰色阴影显示iccarm、iasmarm和ilinkarm,表示它们分别是编译器、汇编器和链接器。
图8显示了ADuCM360的架构。在ADuCM360的外围设备中,只有I2C、UART和GPIO用于与ADE7953和电脑进行通信。



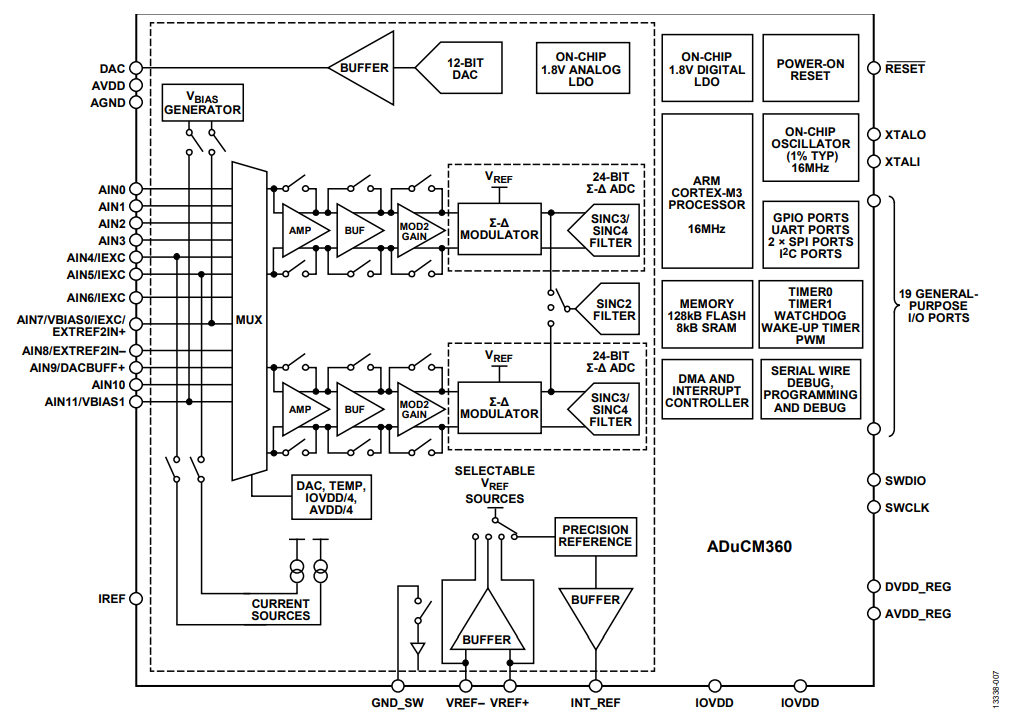
首先,将UART配置为与电脑通信,然后将 I2配置为接口 与ADE7953通信。
尽管本应用笔记的重点讲述 I2接口,但可下载文件 AN_1367_I2C_interface.zip提供的示例代码中也包含可用于 UART接口和GPIO的模块程序。
初始化适用于UART和 I2C 的ADUCM360
开发任意嵌入式C代码时,首先要禁用看门狗定时器看门狗定时器,然后按照需要为内核和外围设备配置时钟。
看门狗定时器在执行任何复位操作之后都会自动启用。要禁用ADuCM360的看门狗定时器,在T3CON[5]中写入0’b0,这是看门狗定时器的使能位。
// Step 1. Disable the watchdog timer.
*pT3CON=0x0;
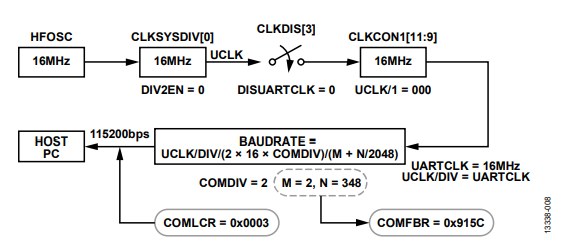
然后,配置UART、 I2C和Cortex-M3内核的时钟。图9和图 10显示了如何配置UART和 I2C的时钟。将内核时钟配置为16 MHz,然后相应设置UART和 I2C接口的控制寄存器。通过CLKCON1选择 I2C系统分频比时,确保内核的时钟频率低于或等于 I2C系统时钟的分频比,也就是说,HCLK≤I2CCLK。此情况适用于时钟可由CLKCON1划分的所有外围设备来说。如果外围时钟较慢,则连接至外围设备的时钟会被封闭,造成外围设备不工作。欲了解更多信息,请参考ADuCM360/ADuCM361硬件用户指南。
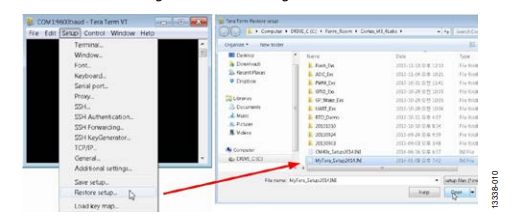
如图9所示,电脑的UART接口的设置传输速率为115,200 bps。因此,请相应配置Tera Term工具。参考名为“MyTera_ Setup2014.INI”的Tera Term项目文件,该文件可从可下载文件AN_1367_I2C_interface.zip中获取。
要使用Tera Term项目文件,请如图11所示,从设置 菜单中选择 还原设置 。然后,从电脑的存储位置中选择MyTera_Setup2014.INI项目文件。



从 ADuCM360_I2C_AppNote.c文件(从可下载文件AN_1367_ I2C_interface.zip)中提取的以下C代码说明了如何配置UART接口。代码中的所有变量表示的是与时钟、GPIO和UART相关的MMR。
// 第2步:配置时钟。
// UART速率为115,200 bps:
UCLK/DIV = 16 MHz.
*pCLKDIS=0x03F7;
*pCLKSYSDIV=0x00;
*pCLKCON0=0x0000;
*pCLKCON1=0x0000;
// 第3步:设置选定UART的行为。
*pCOMCON=0x00; // UART 外围设备已启用。
// P0.2是UART的发射率;P0.1是UART的接受率。
*pGP0CON=0x003C;
*pCOMDIV=0x0002; // COMDIV = 2;
*pCOMFBR=0x915C; // Set to 115,200 bps
// WordLength = 8 bits, stop bit = 1 bit,
no parity check.
*pCOMLCR=0x0003;
// COMTX and COMRX are enabled; COMIEN[1]
= COMIEN[0] = 1
*pCOMIEN=0x0003;
UART的中断使能寄存器COMIEN仅适用于UART外围设备的中断(欲了解更多信息,请参考ADuCM360/ADuCM361硬件用户指南)。对于中断将传输至Cortex-M3内核的UART发射器(Tx)/接收器(Rx),如下所示设置相应的ISER:
// ISER = 0xE000E100; enabling UART
interrupt.
write_reg(0xE000E100,0x00020000);
区分中断和例外情况非常重要。例外情况可归类为同步或异步。任何系统故障一般都可称为同步例外,而中断则是异步例外。在ADuCM360的中断矢量表中,UART排在第17位。因此,要启用UART中断,请将ISER的0xE000E100地址位置设置为0x00020000。同样,要启用 I2C中断,请将 ISER如下设置:
OldRegVal=read_reg(0xE000E100);
RegVal = OldRegVal | 0x00200000; // for
I2C
write_reg(0xE000E100,RegVal); //ISER =
0xE000E100;
然后,初始化ADuCM360 I2C外围设备。ADE7953一直是从 机,因此必须将ADuCM360配置为主机。
作为主装置,ADuCM360中可用的 I2C模式包括
- 标准模式:100 kHz
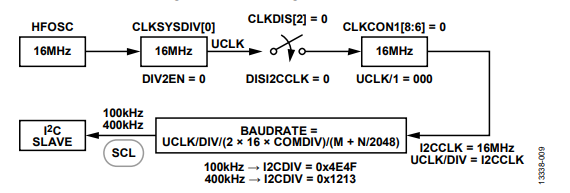
首先设置CLKSYSDIV[0] = 0,CLKCON1[8:6] = 000,然后 设置I2CDIV[15:8] = 0x4E,I2CDIV[7:0] = 0x4F - 快速模式:400 kHz
首先设置CLKSYSDIV[0] = 0,CLKCON1[8:6] = 000,然后 设置I2CDIV[15:8] = 0x12,I2CDIV[7:0] = 0x13
图12显示了SCL在标准模式下的生成方式。

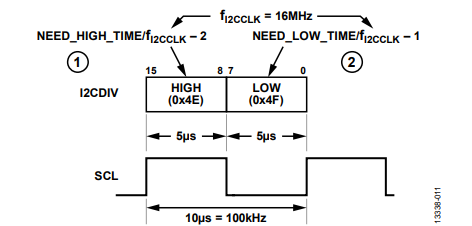
如图10和12所示,fI2CCLK 为16 MHz,如果CLKSYSDIV[0] = 0和CLKCON1[8:6] = 0被初始化,SCL的比特率fSCL则使用以下 公式予以计算:
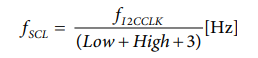
其中:
Low指的是SCL的低速时段,这是由I2CDIV[7:0]设定的。
High指的是SCL的高速时段,这是由I2CDIV[15:8]设定的。
在标准模式中,I2CDIV[7:0]被设置为0x4F (0d'78),I2CDIV[15:8]被设置为0x4E (0d’79)。使用这些数字就能获得100 kHz的SCL时钟频率。
为了在Visual C++中使用此代码,则增加以下说明:
#ifdef FermiEmulation_Mode
//to initialize all of the ADuCM360
register set.
ADuCM360_RegsInit();
#endif
欲了解更多有关此示例代码的信息,请参考 I2C接口:ADuCM360和ADE7953部分。此示例代码是基于超环架构的。因此,这种代码类型无法处理多任务。通过Tera Term工具使用菜单使得任何图形用户界面(GUI)元件可由Visual C++或Visual Basic轻松实现。大部分工厂自动化系统使用这一方法。
I2C 接口:ADUCM360和ADE7953
通过SCL和SDA两点实现I2C接口。(注意,在此部分中,多 功能引脚(例如P2.0/SCL/UARTCLK)都是因与某一功能(例如SCL)相关才被引入的。
- SCL:串行时钟引脚。只有主机才能生成I2C时钟;SCL 可用在标准模式或快速模式中。
- SDA:串行数据引脚。
SCL和SDA均为双向,必须用一个上拉电阻器连接到正极电源。尽管在本例中SCL是由ADuCM360生成,但理论上,它可以是双向的,因为ADuCM360的 I2C 接口可以设置为从属接口。ADE7953的 I2C 接口只能被用作从属接口。
注意,ADE7953在SCL和SDA边缘之间最低要求有0.1 µs的延时;查看数据手册中的tHD;DAT规格。ADE7953数据手册还 列出了其他必须保持的正时规格。
图14所示为一个典型I2C传输序列。


ADuCM360有两个 I2接口:一个是通过P0.1/SCLK1/SCL/ SIN与P0.2/MOSI1/SDA/SOUT引脚,另一个是通过 P2.0/SCL/ UARTCLK与P2.1/SDA/UARTDCD引脚。在此例中,使用的是P2.0/SCL/UARTCLK和P2.1/SDA/UARTDCD引脚。
// P2.0/SCL/UARTCLK 被用于 SCL,P2.1/SDA/UARTDCD
被用于 SDA。
*pGP2CON |= 0x05;
// Master Enable, Tx/Rx Request Interrupt
Enable.
*pI2CMCON = 0x131;
每个从设备都有一个 I2C操作地址,主设备可利用此地址 识别从设备,该地址由供应商设定。例如,ADE7953地址为0x38。
I2C 寻址类型可为7位或10位。根据ADE7953的寻址类型, 本例使用7位寻址。
如图13所示,ADuCM360的 I2C 接口具有2字节发射和接收 FIFO方案。

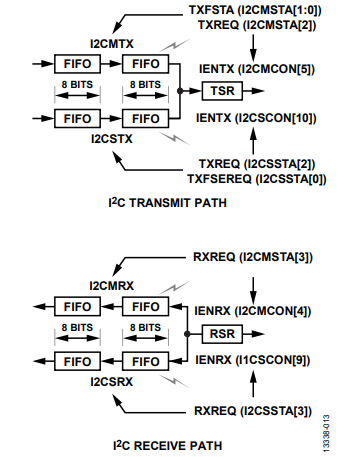
核心时钟和外围时钟通常是不同的。如果数据从一个时钟域传输至另一个时钟域,则可能因通信过程中的错误出现压稳定性。为了避免这一情况,通常使用FIFO或双端口RAM。使用组合逻辑无法解决亚稳定性问题。
图15显示了主设备如何将7位地址(Bits[7:1])和方向(读取和写入)位(Bit 0)发送至从设备。


I2CADR0寄存器保存从设备地址和方向位。
ADE7953的 I2C接口支持的最高串行时钟频率为400 kHz。
图16和图17分别显示了ADE7953的 I2C 写入和读取操作。



ADE7953I2C地址为0b'0111000x,x是个方向位。0表示写操 作,1表示读操作。
当主设备发出一个7位设备地址且方向字节设为0(即0x70)时,启动ADE7953的写操作。之后是一个16位内部寄存器地址。每接收到一个字节,ADE7953就会向主机发出一个应答。主机随后发送寄存器数据,第一个是MSB。数据的长度可以是8位、16位、24位或32位,具体取决于寄存器本身。最后一个字节传输完成后,主机发出停止条件,总线返回空闲状态。
编写源代码时,重要的是要了解如何在目标设备上执行I2C 。
下列代码片段代表的是ADE7953 I2C 的写操作:
void I2C_Write_ADE7953(void)
{
int i=0;
if (((I2CMasterTxDat[0] >4) &&
(I2CMasterTxDat[0] <=
6))||((I2CMasterTxDat[0] >9))) {
printf("The specified ADE7953
register address is out of range\n");
} else {
ReadFlag=0;
uiMasterTxIndex = 0;
// Master case : send 1st data.
*pI2CMTX =
I2CMasterTxDat[uiMasterTxIndex++];
I2cMWrCfg(0x70);
while (!ucComplete){}
ucComplete = 0;
}
}
前面代码中的假设条件是基于ADE7953地址范围。寄存器地址的MSB决定地址是否超出范围。参考ADE7953数据手册和ADE7953评估板用户指南了解更多信息。
I2cMWrCfg(0x70)程序如图15和图16所示,向ADE7953发送 0x01110000 (0x70)。
每收到一个字节,ADE7953都会向主机应答,ADuCM360都会生成一个I2C 接口,以调用在 ADuCM360_Test_Lib.h文 件中找到的I2C0_Master_Int_Handler函数,这会改变前面 代码的ucComplete值。如果ucComplete值改变,I2C_Write_ADE7953()会退出当型循环并继续向ADE7953发送一 个字节。
往任何ADE7953寄存器中写入时,必须确保数据长度匹配寄存器的描述。从ADE7953 IC中回读信息时,这一观念也同样适用。I2C0_Master_Int_Handler函数在写操作和读操作中都会考虑寄存器数据的长度。
在代码中存在错误,尤其是针对初始项目或使用新IC时,使用Visual C++调试程序帮助调试。使用Visual C++ 调试程序也能帮助用户理解代码是如何工作的。
一般来说,嵌入式代码涉及物理地址,但Visual C++只能 解读由操作系统(OS)的MMU分配的虚拟地址。程序运行时,虚拟地址可能改变。Cortex-M系列微控制器不包含一个MMU;因此,基于Cortex-M内核的MCU不能被轻易迁移到(例如)Windows® CE或Linux® OS中。要学习如何利用Visual C++与嵌入式C代码,请参考利用Visual C++仿真嵌入式C代码章节。”
利用Visual C++仿真嵌入式C代码
在Visual C++中完成整个C代码之后,要为ADuCM360生成一张可执行的图形,请在Keil MDK-ARM或IAR EmbeddedWorkbench IDE中执行重建。因为示例代码中的以下C/C++预编译器指令,这种重建是可行的:
#ifdef FermiEmulation_Mode
// to initialize all of the ADuCM360
register set.
ADuCM360_RegsInit();
#endif
在使用Visual C++ 2012调试程序工具时,以下这种逐步进行的步骤有助于理解调试过程。注意,以下方法可用于任何Visual Studio版本。
- 如图18所示,创建一个新项目。
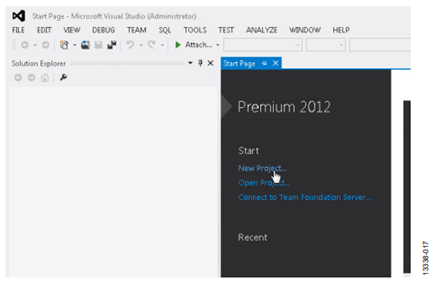


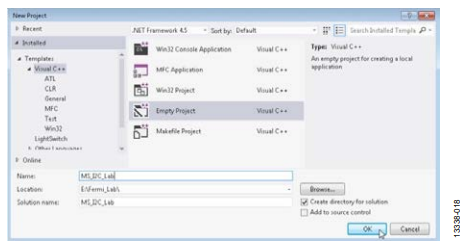
图18. 创建新项目 - 如图19所示,选择 Empty Project。
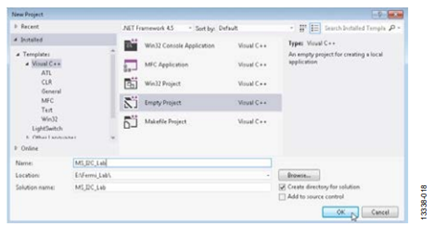


图19. 选择Empty Project - 如图20和图21所示,将所有样本文件和现有项目添加到该项目中。
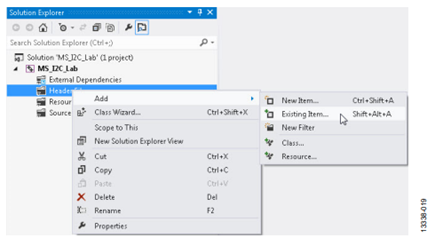

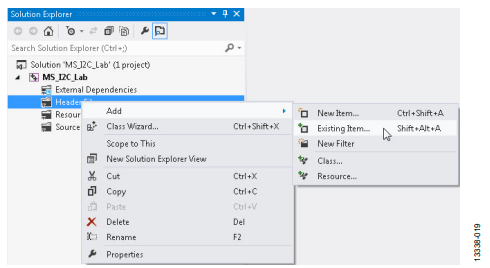
图20. 添加样本文件 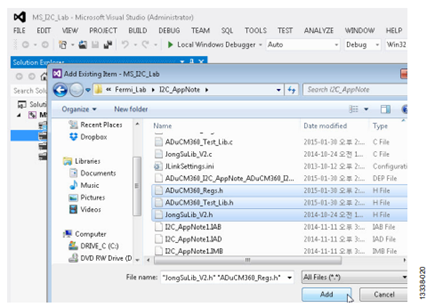

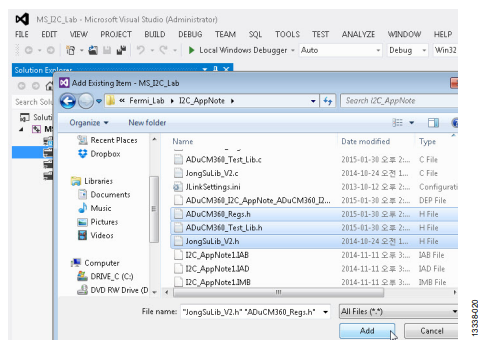
图21. 添加现有项目 - 如图22至图25所示,更改某些属性。
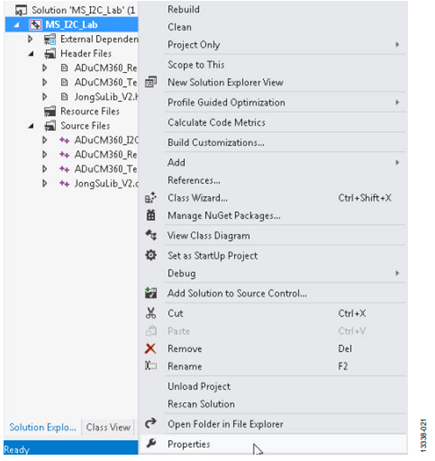


图22. 选择 Properties - 在C/C++下选择包含示例代码的文件夹。点击
Additional Include Directories。参考图23和图24。
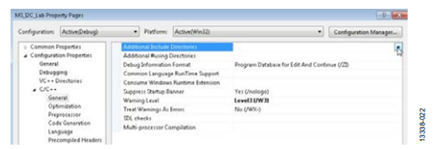

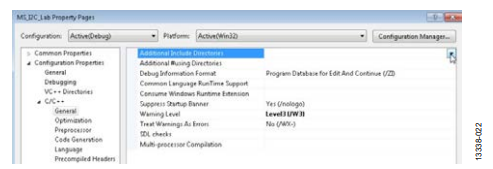
图23. 搜索示例代码 

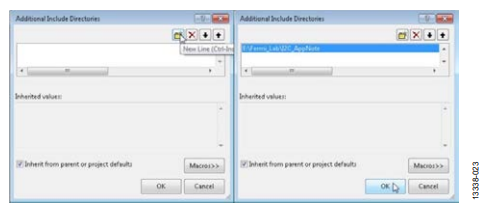
图24. 选择包括Visual Studio示例代码的文件夹 - 如图25所示,仅对Visual C++编译器定义FermiEmulation_Mode。这一步骤基于哪个Visual C++代码可编程并与嵌入式C代码配合使用来预定义FermiEmulation_Mode 。使用其他Visual Studio版本时,需要搜索图22至图25中所示的相应选项,但步骤不变。仅为.NET添加 _CRT_SECURE_NO_
WARNINGS (参考图25)。
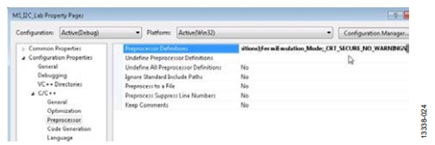


图25. 定义代码 - 如图26所示,编译和链接Visual C++下的所有示例代码。
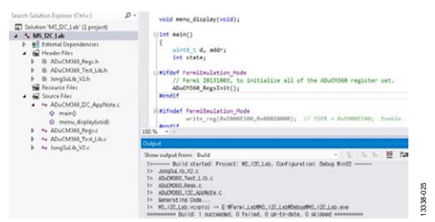

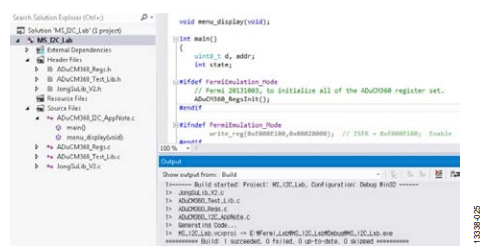
图26. 编译和链接所有示例代码








如图26所示,代码中没有错误和警告。
图27显示了如何利用Visual C++仿真嵌入式代码。

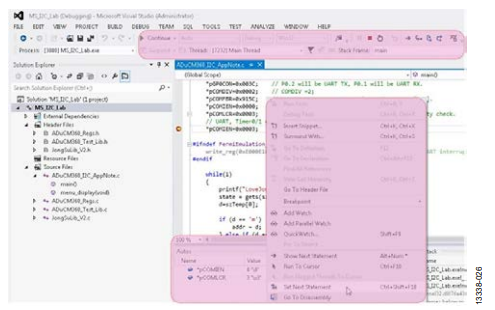
要了解Visual C++如何工作,请仔细分析 ADuCM360_Regs.c和ADuCM360_Regs.h。这些文件定义与ADuCM360有关的真实地址,并启用MMU以依照真实地址分配虚拟地址,以便Visual C++能够除去这些文件的错误。注意,这些文件也可以通过Keil MDK-ARM或IAR Embedded Workbench进行调试。如果使用Keil MDK-ARM或IAR Embedded Workbench进行调试,则无需使用FermiEmulation_Mode。
这种调试方法非常简单,可用在所有类型的处理器中。使用Visual C++调试程序的优点在于易于分析I2C0_Master_Int_Handler函数和设置/获取命令。
I2C0_Master_Int_Handler函数的以下命令是用于同步:
#ifndef FermiEmulation_Mode
__asm{ nop}
__asm{ nop}
__asm{ nop}
__asm{ DSB}
__asm{ nop}
__asm{ nop}
#endif
下载示例代码中的printf函数旨在使用Visual C++时缩小代 码尺寸;因此,如果使用Keil MDK-ARM或IAR Embedded Workbench运行库,则代码尺寸可能更大。在JongSuLib_V2.c库文件中可以找到压缩printf函数,它还包含许多有用的其他函数,例如寄存器读/写函数。名称为ADuCM360_Test_Lib.c的有用库文件包含支持ADuCM360外围设备(如 I2C、SPI、UART和ADCs/DAC)的函数。这两种通用库在需要时也可导入其他项目。
结论
本应用笔记说明了如何实现 I2C C语言代码,来通ADuCM360监控和修改ADE7953的寄存器。建议使用Visual C++来开发代码,因为使用此工具很容易进行编码和调试。然后使用Keil MDK-ARM或IAR Embedded Workbench来编译和链接C代码,无需额外更改,即可生成可执行文件。
作者
