AN-1352: ADA4571校准程序
简介
ADA4571是一款模拟各向异性磁阻(AMR)的角度传感器,由一个检测元件和一个调理信号的模拟仪表放大器组成。本应用笔记讨论多种用以降低传感器角度线性度误差的简单校准程序。AMR角度传感器元件由两个阻性惠斯登电桥构成。每个惠斯登电桥在传感器内完全独立。阻性匹配误差由细微的工艺差异引起。这些匹配误差表现为电气失调和两个电桥之间的幅度差异。为了从AMR传感器获得最精确的测量结果,务必执行简单的校准程序。


校准ADA4571
ADA4571单点EOL(线端)校准程序
图2和图3分别显示了使能和禁用增益控制(GC)模式时利用室温校准可以实现的全温度范围典型精度。




ADA4571 AMR磁场角度的两个角度相关输出电压为 VSIN和 VCOS。下面的公式表示磁场旋转一整圈时的这两个输出,以 VDD/2为基准:
VSIN = AS × sin(2 × α + θS) + OS
其中:
AS 为 VSIN的幅度。
α为当前磁场角度。
θS为 VSIN的相位。
OS 为VSIN的失调。
VCOS = AC × cos(2 × α + θC) + OC
其中:
AC为 VCOS的幅度。
α为当前磁场角度。
θC为 VCOS的相位。
OC 为VCOS的失调。
典型输出信号如图4所示。


VSIN 和 VCOS通道之间的幅度匹配误差(k)经过生产测试,额定最大值为±1%。不过,该匹配误差通常要小得多。图5显示了一系列样片的幅度匹配误差分布。


图6显示了幅度不匹配的理论误差贡献。


此误差比系统中的其他误差通常要小得多。此外,试图校正幅度不匹配的任何计算错误也可能给系统带来额外误差。因此,应忽略幅度不匹配校正。
VSIN 和 VCOS通道之间的正交误差额定最大值为0.05°,不过其典型值要小得多。因此,正交误差的误差贡献可以忽略不计,此因素也应予以忽略。
由于各通道的幅度不匹配和相位误差被忽略,因此以上公式可简化为:
VSIN = A × sin(2 × α) + OS
其中,A 是正弦和余弦通道的幅度。
VCOS = A × cos(2 × α) + OC
对于最终角度,仅留下失调这一主要误差贡献因素。
ADA4571单温度校准
完成下列步骤,旋转一整圈(360°),以便校准器件。注意:如果可能,建议在尽可能接近最终应用温度的情况下完成如下程序。
- 沿任一方向将磁激励旋转360°,同时连续监控器件的 VSIN 和 VCOS输出。
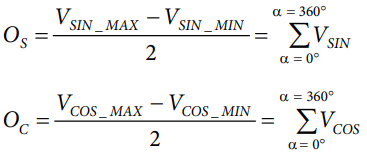
- 独立计算 VSIN 和 VCOS的失调。通过最大值和最小值,或通过相应输出计算失调,如下式所示:
最终角度
利用arctangent2函数计算最终电气角度。
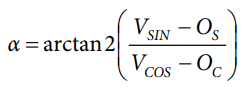
对于每次360°磁旋转,该结果重复两次(参见图7)。这是AMR技术的功能之一。


ADA4571双温度EOL校准
为了进一步降低器件宽温度范围内的误差,应完成双温度EOL校准。使用片上温度传感器监控待测器件(DUT)的温度。
由于本校准程序使用ADA4571集成的温度传感器,因此双温度校准程序不需要精密温度测试系统或任何其他温度监控器件。只要系统能够进入高温和低温(相对于最终应用的工作温度范围而言),便能很好地执行此类校准。
图8显示了经过25°C单点校准之后,ADA4571失调漂移引起的剩余失调的正弦和余弦输出典型数据。对于双温度校准程序,此数据集得到了检验。


在室温下进行单点校准之后,器件可实现典型角度误差结果(参见图3)。然而,双温度校准可提高整个工作温度范围内的精度。
图9、图10和图11显示了在若干不同温度点进行双点校准之后ADA4571的剩余失调。如果改变所选的温度,会得到不同的剩余失调曲线。为了降低失调漂移的影响,最好选择两个能够代表最终应用完整工作温度范围的校准温度。在整个工作温度范围内,剩余失调幅度越低,则角度计算将越精确。






按照单点EOL(线端)校准程序所述,利用相同的分析减少输出项,两个输出项便简化为:
VSIN = A × sin(2 × α) + OS
VCOS = A × cos(2 × α) + OC
然而,必须考虑失调温漂的校正系数。将此校正系数增加 到VSIN 和 VCOS 公式的末尾,如下所示:
VSIN = A × sin(2 × α) + OS1 + TCS × (VTEMP_CUR – VTEMP1)
其中:
OS1为温度1 (T1)时的正弦通道失调。
VTEMP_CUR为当前工作温度时的VTEMP输出电压。
VTEMP1为T1时的VTEMP输出电压。
TCS为正弦通道的温度系数,等于:
其中:
OS2为温度2 (T2)时的正弦通道失调。
VTEMP2为T2时的VTEMP输出电压。
VCOS = A × cos(2 × α) + OC1 + TCC × (VTEMP_CUR – VTEMP1)
其中:
OC1为T1时的余弦通道失调。 TCC为余弦通道的温度系数,等于:
其中:
OC2 为温度2时的余弦通道失调。
为了得到如下理想公式,初始校准失调和漂移均必须从上述公式中消除:
VSIN = A × sin(2 × α)
VCOS = A × cos(2 × α)
双温度校准程序要求监控器件的一个附加引脚,即VTEMP引脚。
双温度校准程序
完成如下步骤,以便对ADA4571进行双温度校准:
- 让系统处于T1,并在第2步中保持温度稳定。
- 沿任一方向将磁激励旋转360°,同时连续监控器件的 VSIN 和 VCOS 输出。监控VTEMP输出,记录VTEMP1的温度 信息。
- 按照ADA4571单温度校准部分所述的相同方案,独立计 算 VSIN (OS1) 和 VCOS (OC1)的失调。
- 让系统处于T2,并在第5步中保持温度稳定。
- 沿任一方向将磁激励旋转360°,同时连续监控器件的 VSIN 和 VCOS输出。监控VTEMP输出,记录 VTEMP2的温度信息。
- 按照ADA4571单温度校准部分所述的相同方案,独立计算 VSIN (OS2) 和 VCOS (OC2) 的失调。
- 使用以下公式计算各通道的失调温度系数:
最终角度
在器件工作过程中,为了校正失调漂移,应监控VTEMP引脚通道。通过下式计算最终角度:
ADA4571动态校准程序
动态校准仅在自由运行应用中执行,此时传感器完成电气旋转的速度快于环境改变的速度。一般而言,这种情况要求电气旋转速度快于1 Hz。对于轴尾磁体配置,电气旋转速度1 Hz相当于30 rpm的电机转速。在较慢的电机中也可以执行动态校准,但动态校准的精度取决于电机转速与系统温度变化速度的关系。
动态校准与单点校准相似,仅需进行失调校正便可实现所需的精度。不过,失调校正系数会不断更新以提高精度。执行动态校准时,建议使能ADA4571的GC模式,因为它能提高信噪比(SNR),进而降低器件的角度误差。
采用单点EOL(线端)校准程序中的简化公式,只有正弦和余弦通道的失调这两个系数需要计算。
VSIN = A × sin(2 × α) + OS
VCOS = A × cos(2 × α) + OC
在器件的第一次整圈旋转中,正弦和余弦通道的失调未知,因此,使用单点EOL校准方案或令 OS = OC = 0。设置 OS = OC = 0 时,启动精度由ADA4571数据手册中的未校正误差部分和未校正误差典型性能特性指定,直至在未来的机械旋转中进行失调调整。
外部控制器必须保存正弦和余弦通道在第一次整圈旋转中的最大值和最小值。利用这些值独立确定各通道的失调。为了校正失调,传感器必须机械旋转一整圈,而不是电气旋转一圈,这点很重要。对于轴尾安装配置的单偶极子磁体,机械旋转一圈产生 VSIN 和VCOS输出的两个正弦周期。每个周期的失调略有不同,因此,捕捉两个周期内的最小值和最大值可以得出各通道的平均失调,从而在动态校准中使用最精确的值。
图12显示了轴尾磁体配置的AMR电气角度和机械角度之间的差异。


动态校准的精度取决于各通道失调计算的精度。当电机以1000 rpm或更高的速度旋转时,最好使用动态校准。在1000 rpm时,电气周期比环境温度变化快好几个数量级。这种情况下,用于计算失调的最小值和最大值是从多个机械周期获得,以便确保精确计算失调。
最终电气角度计算使用与单点校准相同的程序,不过OS和OC会连续更新,如下所示:
作者
